 Products Home
Products Home8 Megapixel CCD Scientific Cameras for Microscopy

- 8 Megapixel Monochrome and Color CCD Cameras
- Scientific-Grade Cameras with Low Read Noise
- Up to 17.1 Frames per Second for the Full Sensor
- Support for LabVIEW, MATLAB, µManager, and MetaMorph
Application Idea
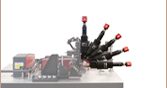
8051M-GE Scientific CCD Camera Mounted on a Thorlabs Cerna® Widefield Microscope
8051M-USB
Non-Cooled Monochrome Camera
8051C-GE-TE
Hermetically Sealed
Two-Stage Cooled Color Camera
S805MU1
Camera with the Sensor
Face Plate Removed and a
Wedged Window Installed



















Please Wait
| Scientific Camera Selection Guide | |
|---|---|
| Compact Scientific |
Zelux™ (Smallest Profile) |
| Kiralux® CMOS | |
| Kiralux® CMOS Polarization Sensitive | |
| Quantalux® (<1 e- Read Noise) |
|
| Scientific CCD | 1.4 MP CCD |
| 4 MP CCD | |
| 8 MP CCD | |
| VGA Resolution CCD (200 Frames Per Second) |
|
 Jason Mills General Manager, Thorlabs Scientific Imaging |
Feedback? |

Click to Enlarge
A brightfield microscopy image acquired with one of our 8 megapixel cameras showing ki-67 labeled tonsil cells. Ki-67 is an antigen which appears only in the nuclei of cells undergoing division, and therefore is an excellent marker to indicate the growth fraction of a cell population. For more image samples, please see the Applications tab.
Features
- 4/3" Format, 3296 x 2472 Monochrome or Color CCD Sensor (On Semi KAI-08051M or KAI-08051-FBA) for Large Field of View
- Available in Non-Cooled Standard Packaging or Hermetically Sealed TE-Cooled Packaging
- Configuration Offered with the Sensor Face Plate Removed to Reduce Fringing in Coherent Light Applications, such as Beam Profiling
- Low Read Noise Improves the Threshold of Detectability Under Low Light Conditions
- Software-Selectable 20 MHz or 40 MHz Readout: Maximize Frame Rate (40 MHz) or
Minimize Noise (20 MHz) - Asynchronous Reset, Triggered, and Bulb Exposure Modes (See Triggering Tab for Details)
- ThorCam GUI with 32- and 64-Bit Windows® 7 or 10 Support
- SDK and Programming Interface Support:
- C, C++, C#, Python, and Visual Basic .NET APIs
- LabVIEW, MATLAB, µManager, and MetaMorph Third-Party Software
- 1/4"-20 Tapped Holes for Post Mounting
Thorlabs' 8 Megapixel CCD Cameras (US Patent 9,380,241 B2), which offer up to 17.1 frames per second at 40 MHz quad-tap readout of the full sensor, are specifically designed for demanding scientific imaging applications such as microscopy or those requiring coherent light. These cameras are ideal for brightfield microscopy, inspection, and other techniques that would benefit from a low-noise, large field of view imager.
With the exception of the S805MUx models, each camera comes with a user-removable IR filter; for complete details on the transmission please see the Specs tab. If the filter is removed, it can be replaced with a user-supplied Ø1" (Ø25 mm) filter or another optic up to 4 mm thick; please see the camera manual, found under the red Docs icons (![]() ) below, for details. Our S805MU1 and S805MU2 cameras are identical to the 8051M-USB camera, except that the sensor face plate is removed and the IR filter is replaced with a wedged window. These models are ideal for applications that are sensitive to interference patterns caused by reflections from the sensor face plate.
) below, for details. Our S805MU1 and S805MU2 cameras are identical to the 8051M-USB camera, except that the sensor face plate is removed and the IR filter is replaced with a wedged window. These models are ideal for applications that are sensitive to interference patterns caused by reflections from the sensor face plate.
USB 3.0 or Gigabit Ethernet Industry-Standard Interfaces
Thorlabs' 8 megapixel cameras have either a USB 3.0 or Gigabit Ethernet (GigE) interface. GigE is ideal for situations where the camera must be far from the PC or there are multiple cameras that need to be controlled by the same PC. The GigE cameras are provided with a GigE frame grabber card and cables. Since USB 3.0 is supported by most computers, the USB cameras do not come with a card; however, one is available separately. A power supply and software are supplied with all cameras. More information on what's included is on the Shipping List tab. Your computer must have a free PCI Express slot to install the GigE interface. For more information on the three interface options and recommended computer specifications, please see the Interface tab.
Our cameras have triggering options that enable custom timing and system control; for more details, please see the Triggering tab. External triggering requires a connection to the auxiliary port of the camera. Accessory cables and boards to "break out" the individual signals are available below.



Click to Enlarge
Click for Raw Data
This curve shows the quantum efficiency for the color camera sensor's red, green, and blue pixels.
Click to Enlarge
Click for Raw Data
This curve shows the quantum efficiency for the monochrome camera sensor.
| Sample Frame Rates at 1 ms Exposure Time | ||||||
|---|---|---|---|---|---|---|
| CCD Size and Binninga | Single Tap | Dual Tap | Quad Tapb | |||
| 20 MHz | 40 MHz | 20 MHz | 40 MHz | 20 MHz | 40 MHz | |
| Full Sensor (3296 x 2472) | 2.3 fps | 4.5 fps | 4.4 fps | 8.5 fps | 8.8 fps | 17.1 fps |
| Full Sensor, Bin by 2 (1648 x 1048) | 4.4 fps | 8.5 fps | 8.3 fps | 15.7 fps | 16.6 fps | 31.2 fps |
| Full Sensor, Bin by 10 (329 x 247) | 17.0 fps | 29.9 fps | 29.0 fps | 47.1 fps | 56.8 fps | 92.3 fps |
| Common Specificationsa | |||||||
|---|---|---|---|---|---|---|---|
| Sensor Type | ON Semiconductor KAI-08051 | ||||||
| Number of Active Pixels | 3296 x 2472 (Horizontal x Vertical) |
||||||
| Imaging Area | 18.13 mm x 13.60 mm (Horizontal x Vertical) |
||||||
| Pixel Size | 5.5 µm x 5.5 µm | ||||||
| Optical Format | 4/3" Format (22 mm Diagonal) | ||||||
| Peak Quantum Efficiency | Monochrome: 51% at 460 nm Color: See Graph to the Right |
||||||
| Exposure Time | 0 to 1000 s in 1 ms Incrementsb | ||||||
| CCD Pixel Clock Speed | 20 or 40 MHz | ||||||
| ADC Gainc | 0 to 1023 Steps (0.036 dB/Step) | ||||||
| Optical Black Clamp | 0 to 1023 Steps (0.25 ADU/Step)d | ||||||
| Vertical Hardware Binninge | Continuous Integer Values from 1 to 10 | ||||||
| Horizontal Software Binninge | Continuous Integer Values from 1 to 10 | ||||||
| Region of Interest | 1 x 1 Pixel to 3296 x 2472 Pixels, Rectangular | ||||||
| Read Noisef | <10 e- at 20 MHz | ||||||
| Monochrome Item #a | S805MU1 | S805MU2 | 8051M-USB | 8051M-USB-TE | 8051M-GE | 8051M-GE-TE |
|---|---|---|---|---|---|---|
| Color Item #a | N/A | N/A | 8051C-USB | 8051C-USB-TE | 8051C-GE | 8051C-GE-TE |
| Number of Taps (Software Selectable) |
Single, Dual, Quad | Single, Dual | ||||
| Digital Output | 14 Bit | Single Tap: 14 Bit Dual-Tap: 12 Bit |
||||
| Cooling | No | Sensor Cools to -10 °C at 20 °C Ambient Temperature |
No | Sensor Cools to -10 °C at 20 °C Ambient Temperature |
||
| Host PC Interfacea | USB 3.0 | Gigabit Ethernet | ||||
| Lens Mount | 1.375"-32 Threading | C-Mount (1.000"-32) | ||||
| Built in Optics (Click for Graphs) |
Wedged Window (400- 700 nm)b |
Wedged Window (700 - 1100 nm)b |
IR Blocking Filterc | |||

Click to Enlarge
Non-Cooled Standard Packaging

Click to Enlarge
Packaging for Cameras with the Sensor Face Plate Removed

Click to Enlarge
Hermetically Sealed Cooled Packaging
Thorlabs' Scientific-Grade CCD Cameras are ideal for a variety of applications. The photo gallery below contains images acquired with our 1.4 megapixel, 4 megapixel, 8 megapixel, and fast frame rate cameras.
To download some of these images as high-resolution, 16-bit TIFF files, please click here. It may be necessary to use an alternative image viewer to view the 16-bit files. We recommend ImageJ, which is a free download.
| Thorlabs' Scientific Camera Applications (Click Images for Details) | ||||||
|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
| Intracellular Dynamics | Brightfield Microscopy | Ophthalmology (NIR) | Fluorescence Microscopy | Multispectral Imaging | Neuroscience | SEM/TEM |
| Thorlabs' Scientific Camera Recommended for Above Application | ||||||
| 1.4 Megapixel Fast Frame Rate |
4 Megapixel 8 Megapixel |
1.4 Megapixel | 4 Megapixel 1.4 Megapixel |
4 Megapixel 1.4 Megapixel |
1.4 Megapixel | 1.4 Megapixel 4 Megapixel Fast Frame Rate |
Multispectral Imaging
The video to the right is an example of a multispectral image acquisition using a liquid crystal tunable filter (LCTF) in front of a monochrome camera. With a sample slide exposed to broadband light, the LCTF passes narrow bands of light that are transmitted from the sample. The monochromatic images are captured using a monochrome scientific camera, resulting in a datacube – a stack of spectrally separated two-dimensional images which can be used for quantitative analysis, such as finding ratios or thresholds and spectral unmixing.
In the example shown, a mature capsella bursa-pastoris embryo, also known as Shepherd's-Purse, is rapidly scanned across the 420 nm - 730 nm wavelength range using Thorlabs' KURIOS-WB1 Liquid Crystal Tunable Filter. The images are captured using our 1501M-GE Scientific Camera, which is connected, with the liquid crystal filter, to a Cerna® Series Microscope. The overall system magnification is 10X. The final stacked/recovered image is shown below.
Click to Enlarge
Final Stacked/Recovered Image
Thrombosis Studies
Thrombosis is the formation of a blood clot within a blood vessel that will impede the flow of blood in the circulatory system. The videos below are from experimental studies on the large-vessel thrombosis in Mice performed by Dr. Brian Cooley at the Medical College of Wisconsin. Three lasers (532 nm, 594 nm, and 650 nm) were expanded and then focused on a microsurgical field of an exposed surgical site in an anesthenized mouse. A custom 1.4 Megapixel Camera with integrated filter wheel were attached to a Leica Microscope to capture the low-light fluorescence emitted from the surgical site. See the videos below with their associated descriptions for further infromation.
Arterial Thrombosis
In the video above, a gentle 30-second electrolytic injury is generated on the surface of a carotid artery in an atherogenic mouse (ApoE-null on a high-fat, “Western” diet), using a 100-micron-diameter iron wire (creating a free-radical injury). The site (arrowhead) and the vessel are imaged by time-lapse fluorescence-capture, low-light camera over 60 minutes (timer is shown in upper left corner – hours:minutes:seconds). Platelets were labeled with a green fluorophore (rhodamine 6G) and anti-fibrin antibodies with a red fluorophore (Alexa-647) and injected prior to electrolytic injury to identify the development of platelets and fibrin in the developing thrombus. Flow is from left to right; the artery is approximately 500 microns in diameter (bar at lower right, 350 microns).
Venous Thrombosis
In the video above, a gentle 30-second electrolytic injury is generated on the surface of a murine femoral vein, using a 100-micron-diameter iron wire (creating a free-radical injury). The site (arrowhead) and the vessel are imaged by time-lapse fluorescence-capture, low-light camera over 60 minutes (timer is shown in upper left corner – hours:minutes:seconds). Platelets were labeled with a green fluorophore (rhodamine 6G) and anti-fibrin antibodies with a red fluorophore (Alexa-647) and injected prior to electrolytic injury to identify the development of platelets and fibrin in the developing thrombus. Flow is from left to right; the vein is approximately 500 microns in diameter (bar at lower right, 350 microns).
Reference: Cooley BC. In vivo fluorescence imaging of large-vessel thrombosis in mice. Arterioscler Thromb Vasc Biol 31, 1351-1356, 2011. All animal studies were done under protocols approved by the Medical College of Wisconsin Institutional Animal Care and Use Committee.
Camera Back Panel Connector Locations

Click to Enlarge
8051M-USB, 8051C-USB, S805MU1, S805MU2, 8051M-USB-TE, and
8051C-USB-TE Back Panel Layout

Click to Enlarge
8051M-GE, 8051C-GE, 8051M-GE-TE, 8051C-GE-TE Back Panel Layout
TSI-IOBOB and TSI-IOBOB2 Break-Out Board Connector Locations

Click to Enlarge
TSI-IOBOB

Click to Enlarge
TSI-IOBOB2
| TSI-IOBOB and TSI-IOBOB2 Connector | 8050-CAB1 Connectors | Camera Auxiliary (AUX) Port |
|---|---|---|
 Female 6-Pin Mini Din Female Connector |
 Male 6-Pin Mini Din Male Connector (TSI-IOBOB end of Cable)  Male 12-Pin Hirose Connector (Camera end of Cable) |
 Female 12-Pin Hirose Connector (Auxiliary Port on Camera) |
Auxiliary Connector
The cameras and the break-out boards both feature female connectors; the 8 megapixel cameras have a 12 pin Hirose connector, while the break out boards have a 6-pin Mini-DIN connector. The 8050-CAB1 cable features male connectors on both ends: a 12-pin connector for connecting to the camera and a 6-pin Mini-DIN connector for the break-out boards. Pins 1, 2, 3, 5, and 6 are each connected to the center pin of an SMA connector on the break-out boards, while pin 4 (ground) is connected to each SMA connector housing. To access one of the I/O functions not available with the 8050-CAB1, the user must fabricate a cable using shielded cabling in order for the camera to adhere to CE and FCC compliance; additional details are provided in the camera manual.
| Camera AUX Pin # | TSI-IOBOB and TSI-IOBOB2 Pin # |
Signal | Description |
|---|---|---|---|
| 1 | - | Reserved | Reserved for future use |
| 2 | - | Reserved | Reserved for future use |
| 3 | - | Reserved | Reserved for future use |
| 4 | 6 | STROBE_OUT (Output) |
A TTL output that is high during the actual sensor exposure time when in continuous, overlapped exposure mode. It is typically used to synchronize an external flash lamp or other device with the camera. |
| 5 | 3 | TRIGGER_IN (Input) |
A TTL input used to trigger exposures on the transition from the high to low state. |
| 6 | 1 | LVAL (Output) |
Refers to "Line Valid." It is an active-high TTL signal and is asserted during the valid period on each line. It returns low during the inter-line period between each line and during the inter-frame period between each frame. |
| 7 | 2 | TRIGGER_OUT (Output) |
A 6 µs positive pulse asserted when using the various external trigger input options; TRIGGER_IN or LVDS_TRIGGER_IN. The signal is brought out of the camera as TRIGGER_OUT at the High-to-Low transition to allow triggering of other devices. |
| 8 | - | LVDS_TRIGGER_IN_N (Input, Differential Pair with Pin 9) |
A LVDS (low-voltage differential signal) input used to trigger exposures on the transition from the high state to low state. The suffix "N" identifies this as the negative input of the LVDS signal. |
| 9 | - | LVDS_TRIGGER_IN_P (Input, Differential Pair with Pin 9) |
A LVDS (low-voltage differential signal) input used to trigger exposures on the transition from the high state to low state. The suffix "P" identifies this as the positive input of the LVDS signal. |
| 10 | 4 | GND | The electrical ground for the camera signals |
| 11 | - | Reserved | Reserved for future use |
| 12 | 5 | FVAL_OUT (Output) |
Refers to "Frame Valid." It is a TTL output that is high during active readout lines and returns low between frames. |
ThorCam™
ThorCam is a powerful image acquisition software package that is designed for use with our cameras on 32- and 64-bit Windows® 7 or 10 systems. This intuitive, easy-to-use graphical interface provides camera control as well as the ability to acquire and play back images. Single image capture and image sequences are supported. Please refer to the screenshots below for an overview of the software's basic functionality.
Application programming interfaces (APIs) and a software development kit (SDK) are included for the development of custom applications by OEMs and developers. The SDK provides easy integration with a wide variety of programming languages, such as C, C++, C#, Python, and Visual Basic .NET. Support for third-party software packages, such as LabVIEW, MATLAB, and µManager* is available. We also offer example Arduino code for integration with our TSI-IOBOB2 Interconnect Break-Out Board.
*µManager control of Zelux and 1.3 MP Kiralux cameras is not currently supported. When controlling the Kiralux Polarization-Sensitive Camera using µManager, only intensity images can be taken; the ThorCam software is required to produce images with polarization information.
| Recommended System Requirementsa | |
|---|---|
| Operating System | Windows® 7 or 10 (64 Bit) |
| Processor (CPU)b | ≥3.0 GHz Intel Core (i5 or Higher) |
| Memory (RAM) | ≥8 GB |
| Hard Drivec | ≥500 GB (SATA) Solid State Drive (SSD) |
| Graphics Cardd | Dedicated Adapter with ≥256 MB RAM |
| Motherboard | USB 3.0 (-USB) Cameras: Integrated Intel USB 3.0 Controller or One Unused PCIe x1 Slot (for Item # USB3-PCIE) GigE (-GE) Cameras: One Unused PCIe x1 Slot |
| Connectivity | USB or Internet Connectivity for Driver Installation |
Software
Version 3.5.1
Click the button below to visit the ThorCam software page.
Example Arduino Code for TSI-IOBOB2 Board
Click the button below to visit the download page for the sample Arduino programs for the TSI-IOBOB2 Shield for Arduino. Three sample programs are offered:
- Trigger the Camera at a Rate of 1 Hz
- Trigger the Camera at the Fastest Possible Rate
- Use the Direct AVR Port Mappings from the Arduino to Monitor Camera State and Trigger Acquisition
Click the Highlighted Regions to Explore ThorCam Features

Camera Control and Image Acquisition
Camera Control and Image Acquisition functions are carried out through the icons along the top of the window, highlighted in orange in the image above. Camera parameters may be set in the popup window that appears upon clicking on the Tools icon. The Snapshot button allows a single image to be acquired using the current camera settings.
The Start and Stop capture buttons begin image capture according to the camera settings, including triggered imaging.
Timed Series and Review of Image Series
The Timed Series control, shown in Figure 1, allows time-lapse images to be recorded. Simply set the total number of images and the time delay in between captures. The output will be saved in a multi-page TIFF file in order to preserve the high-precision, unaltered image data. Controls within ThorCam allow the user to play the sequence of images or step through them frame by frame.
Measurement and Annotation
As shown in the yellow highlighted regions in the image above, ThorCam has a number of built-in annotation and measurement functions to help analyze images after they have been acquired. Lines, rectangles, circles, and freehand shapes can be drawn on the image. Text can be entered to annotate marked locations. A measurement mode allows the user to determine the distance between points of interest.
The features in the red, green, and blue highlighted regions of the image above can be used to display information about both live and captured images.
ThorCam also features a tally counter that allows the user to mark points of interest in the image and tally the number of points marked (see Figure 2). A crosshair target that is locked to the center of the image can be enabled to provide a point of reference.
Third-Party Applications and Support
ThorCam is bundled with support for third-party software packages such as LabVIEW, MATLAB, and .NET. Both 32- and 64-bit versions of LabVIEW and MATLAB are supported. A full-featured and well-documented API, included with our cameras, makes it convenient to develop fully customized applications in an efficient manner, while also providing the ability to migrate through our product line without having to rewrite an application.

Click to Enlarge
Figure 1: A timed series of 10 images taken at 1 second intervals is saved as a multipage TIFF.

Click to Enlarge
Figure 2: A screenshot of the ThorCam software showing some of the analysis and annotation features. The Tally function was used to mark four locations in the image. A blue crosshair target is enabled and locked to the center of the image to provide a point of reference.
Performance Considerations
Please note that system performance limitations can lead to "dropped frames" when image sequences are saved to the disk. The ability of the host system to keep up with the camera's output data stream is dependent on multiple aspects of the host system. Note that the use of a USB hub may impact performance. A dedicated connection to the PC is preferred. USB 2.0 connections are not supported.
First, it is important to distinguish between the frame rate of the camera and the ability of the host computer to keep up with the task of displaying images or streaming to the disk without dropping frames. The frame rate of the camera is a function of exposure and readout (e.g. clock, ROI) parameters. Based on the acquisition parameters chosen by the user, the camera timing emulates a digital counter that will generate a certain number of frames per second. When displaying images, this data is handled by the graphics system of the computer; when saving images and movies, this data is streamed to disk. If the hard drive is not fast enough, this will result in dropped frames.
One solution to this problem is to ensure that a solid state drive (SSD) is used. This usually resolves the issue if the other specifications of the PC are sufficient. Note that the write speed of the SSD must be sufficient to handle the data throughput.
Larger format images at higher frame rates sometimes require additional speed. In these cases users can consider implementing a RAID0 configuration using multiple SSDs or setting up a RAM drive. While the latter option limits the storage space to the RAM on the PC, this is the fastest option available. ImDisk is one example of a free RAM disk software package. It is important to note that RAM drives use volatile memory. Hence it is critical to ensure that the data is moved from the RAM drive to a physical hard drive before restarting or shutting down the computer to avoid data loss.
S805MU1 and S805MU2 Contents Example

Click to Enlarge
Item # Shown: S805MU1
In Addition to the Camera, Each S805MU Item Includes the Following:
- USB 3.0 Cable (Micro B to A)
- Power Supply, with Region-Specific Power Cord
- CD with ThorCam Software
- Quick-Start Guide and Manual Download Information Card
USB 3.0 Contents Example

Click to Enlarge
Item # Shown: 8051M-USB
In Addition to the Camera, Each USB3.0 Item Includes the Following:
- USB 3.0 Cable (Micro B to A)
- Power Supply, with Region-Specific Power Cord
- Wrench to Loosen Optical Assembly
- Lens Mount Dust Cap (Also Functions as IR Filter Removal Tool)
- CD with ThorCam Software
- Quick-Start Guide and Manual Download Information Card
Gigabit Ethernet Contents Example

Click to Enlarge
Item # shown: 8051M-GE
In Addition to the Camera, Each GigE Item Includes the Following:
- Gigabit Ethernet PCI Express Card
- Gigabit Ethernet Cable
- Power Supply, with Region-Specific Power Cord
- Wrench to Loosen Optical Assembly
- Lens Mount Dust Cap (Also Functions as IR Filter Removal Tool)
- CD with ThorCam Software
- Quick-Start Guide and Manual Download Information Card
Camera Noise and Temperature
Overview
When purchasing a camera, an important consideration is whether or not the application will require a cooled sensor. Generally, most applications have high signal levels and do not require cooling. However, for certain situations, generally under low light levels where long exposures are necessary, cooling will provide a benefit. In the tutorial below, we derive the following "rule of thumb": for exposures less than 1 second, a standard camera is generally sufficient; for exposures greater than 1 second, cooling could be beneficial; for exposures greater than 5 seconds, cooling is generally recommended; and for exposures above 10 seconds, cooling is usually required. If you have questions about which domain your application will fall, you might consider estimating the signal levels and noise sources by following the steps detailed in the tutorial below, where we present sample calculations using the specifications for our 1.4 megapixel monochrome cameras. Alternatively you can contact us, and one of our scientific camera specialists will help you decide which camera is right for you.
Sources of Noise
Noise in a camera image is the aggregate spatial and temporal variation in the measured signal, assuming constant, uniform illumination. There are several components of noise:
- Dark Shot Noise (σD): Dark current is a current that flows even when no photons are incident on the camera. It is a thermal phenomenon resulting from electrons spontaneously generated within the silicon chip (valence electrons are thermally excited into the conduction band). The variation in the amount of dark electrons collected during the exposure is the dark shot noise. It is independent of the signal level but is dependent on the temperature of the sensor as shown in Table 1.
- Read Noise (σR): This is the noise generated in producing the electronic signal. This results from the sensor design but can also be impacted by the design of the camera electronics. It is independent of signal level and temperature of the sensor, and is larger for faster CCD pixel clock rates.
- Photon Shot Noise (σS): This is the statistical noise associated with the arrival of photons at the pixel. Since photon measurement obeys Poisson statistics, the photon shot noise is dependent on the signal level measured. It is independent of sensor temperature.
- Fixed Pattern Noise (σF): This is caused by spatial non-uniformities of the pixels and is independent of signal level and temperature of the sensor. Note that fixed pattern noise will be ignored in the discussion below; this is a valid assumption for the CCD cameras sold here but may need to be included for other non-scientific-grade sensors.
Total Effective Noise
The total effective noise per pixel is the quadrature sum of each of the noise sources listed above:

Here, σD is the dark shot noise, σR is the read noise (for sample calculations, we will use our 1.4 megapixel monochrome cameras, which use the ICX285AL sensor. Typically the read noise is less than 10 e- for scientific-grade cameras using the ICX285AL CCD; we will assume a value of 10 e- in this tutorial), and σS is the photon shot noise. If σS>>σD and σS>>σR, then σeff is approximately given by the following:

Again, fixed pattern noise is ignored, which is a good approximation for scientific-grade CCDs but may need to be considered for non-scientific-grade sensors.
| Temperature | Dark Current (ID) |
|---|---|
| -20 °C | 0.1 e-/(s•pixel) |
| 0 °C | 1 e-/(s•pixel) |
| 25 °C | 5 e-/(s•pixel) |

Click to Enlarge
Figure 1: Plot of dark shot noise and read noise as a function of exposure for three sensor temperatures for our 1.4 megapixel cameras. This plot uses logarithmic scales for both axes.The dotted vertical line at 5 s indicates the values calculated as the example in the text.
Dark Shot Noise and Sensor Temperature
As mentioned above, the dark current is a thermal effect and can therefore be reduced by cooling the sensor. Table 1 lists typical dark current values for the Sony ICX285AL CCD sensor used in our 1.4 megapixel monochrome cameras. As the dark current results from spontaneously generated electrons, the dark current is measured by simply "counting" these electrons. Since counting electrons obeys Poisson statistics, the noise associated with the dark current ID is proportional to the square root of the number of dark electrons that accumulate during the exposure. For a given exposure, the dark shot noise, σD, is therefore the square root of the ID value from Table 1 (for a given sensor temperature) multiplied by the exposure time t in seconds:

Since the dark current decreases with decreasing temperature, the associated noise can be decreased by cooling the camera. For example, assuming an exposure of 5 seconds, the dark shot noise levels for the three sensor temperatures listed in the table are



Figure 1, which is a plot of the dark shot noise as a function of exposure for the three temperatures listed in Table 1, illustrates how the dark shot noise increases with increasing exposure. Figure 1 also includes a plot of the upper limit of the read noise.
If the photon shot noise is significantly larger than the dark shot noise, then cooling provides a negligible benefit in terms of the noise, and our standard package cameras will work well.
Photon Shot Noise
If S is the number of "signal" electrons generated when a photon flux of N photons/second is incident on each pixel of a sensor with a quantum efficiency QE and an exposure duration of t seconds, then

From S, the photon shot noise, σS, is given by:

Example Calculations (Using our 1.4 Megapixel Cameras)
If we assume that there is a sufficiently high photon flux and quantum efficiency to allow for a signal S of 10,000 e- to accumulate in a pixel with an exposure of 5 seconds, then the estimated shot noise, σS, would be the square root of 10,000, or 100 e-. The read noise is 10 e- (independent of exposure time). For an exposure of 5 seconds and sensor temperatures of 25, 0, and -25 °C, the dark shot noise is given in equation (4). The effective noise is:



The signal-to-noise ratio (SNR) is a useful figure of merit for image quality and is estimated as:

From Equation 7, the SNR values for the three sensor temperatures are:

As the example shows, there is a negligible benefit to using a cooled camera compared to a non-cooled camera operating at room temperature, and the photon shot noise is the dominant noise source in this example. In this case our standard package cameras should therefore work quite well.
However, if the light levels were lower such that a 100 second exposure was required to achieve 900 e- per pixel, then the shot noise would be 30 e-. The estimated dark shot noise would be 22.4 e- at 25 °C, while at -20 °C the dark shot noise would be 3.2 e-. The total effective noise would be

From Equation 8, the SNR values are

| Exposure | Camera Recommendation |
|---|---|
| <1 s | Standard Non-Cooled Camera Generally Sufficient |
| 1 s to 5 s | Cooled Camera Could Be Helpful |
| 5 s to 10 s | Cooled Camera Recommended |
| >10 s | Cooled Camera Usually Required |
In this example, the dark shot noise is a more significant contributor to the total noise for the 25 °C sensor than for the -25 °C sensor. Depending on the application's noise budget, a cooled camera may be beneficial.
Figure 2 shows plots of the different noise components, including dark shot noise at three sensor temperatures, as a function of exposure time for three photon fluxes. The plots show that dark shot noise is not a significant contributor to total noise except for low signal (and consequently long exposure) situations. While the photon flux levels used for the calculations are given in the figure, it is not necessary to know the exact photon flux level for your application. Figure 2 suggests a general metric based on exposure time that can be used to determine whether a cooled camera is required if the exposure time can be estimated, and these results are summarized in Table 2. If you find that your dominant source of noise is due to the read noise, then we recommend running the camera at a lower CCD pixel clock rate of 20 MHz, since that will offer a lower read noise.



{kind=link}
{kind=link}
{kind=link}
Figure 2: Noise from all sources as a function of exposure for three different photon fluxes: (a) low, (b) medium, and (c) high. In (c) the signal and photon shot noise saturate above approximately 20 seconds because the pixel becomes saturated at the corresponding incident photon levels. A quantum efficiency of 60% was used for the calculations. Note that these plots use logarithmic scales for both axes.
Other Considerations
Thermoelectric cooling should also be considered for long exposures even where the dark shot noise is not a significant contributor to total noise because cooling also helps to reduce the effects of hot pixels. Hot pixels cause a "star field" pattern that appears under long exposures. Figure 3 shows an example of this star field pattern for images taken using cameras with and without TEC cooling with an exposure of 10 seconds.

(a)

(b)
Figure 3: Images of the "star field" pattern that results from hot pixels using our (a) standard non-cooled camera and (b) our camera cooled to -20 °C. Both images were taken with an exposure of 10 seconds and with a gain of 32 dB (to make the hot pixels more visible). Please note that in order to show the pattern the images displayed here were cropped from the full-resolution 16 bit images. The full size 16 bit images may be downloaded here and viewed with software such as ImageJ, which is a free download.
| Recommended System Requirements | |
|---|---|
| Operating System |
Windows® 7, 8.1, or 10 (64 bit) |
| Processor (CPU)a |
≥3.0 GHz Intel Core i5, i7, or i8 |
| Memory (RAM) | ≥8 GB |
| Hard Drive | ≥500 GB (SATA) Solid State Drive (SSD)b |
| Graphics Card | Dedicatedc Adapter with ≥256 MB RAM |
| Power Supply | ≥600 W |
| Motherboard | USB 3.0 (-USB) Cameras: Integrated Intel USB 3.0 Controller or One Unused PCIe x1 Slot (for Item # USB3-PCIE) GigE (-GE) Cameras: One Unused PCIe x1 Slot |
| Connectivity | USB or Internet Connectivity for Driver Installation |
Thorlabs offers two interface options across our scientific camera product line: USB 3.0 and Gigabit Ethernet (GigE). Once other camera decisions, such as field of view and frame rates, have been made, for many of our camera types it is necessary to choose one of these interfaces. It is important to confirm that the computer system meets or exceeds the recommended requirements listed to the right; otherwise, dropped frames may result, particularly when streaming camera images directly to storage media.
Definitions
- Camera Frame Rate: The number of images per second generated by the camera. It is a function of camera model and user-selected settings.
- Effective Frame Rate: The number of images per second received by the host computer's camera software. This depends on the limits of the selected interface hardware (chipset), CPU performance, and other devices and software competing for the host computer resources.
- Maximum Bandwidth: The maximum rate (in bits/second or bytes/second) at which data can be reliably transferred over the interface from the camera to the host PC. The maximum bandwidth is a specified performance benchmark of the interface, under the assumption that the host PC is capable of receiving and handling data at that rate. An interface with a higher maximum bandwidth will typically support higher camera frame rates, but the choice of interface does not by itself increase the frame rate of the camera.
USB 3.0
USB 3.0 is a standard interface available on most new PCs, which means that typically no additional hardware is required, and therefore these cameras are not sold with any computer hardware. For users with PCs that do not have a USB 3.0 port, a PCIe card is sold separately below. USB 3.0 supports a speed up to 320 MB/s and cable lengths up to 3 m. Support for multiple cameras is possible using multiple USB 3.0 ports on the PC or a USB 3.0 hub.
Gigabit Ethernet
GigE is ideal for situations requiring longer cable lengths, as well as for systems that require using multiple cameras with one computer. GigE supports a speed up to 100 MB/s and cable lengths up to 100 m. It also uses fairly inexpensive cables, but does require the use of a computer with a GigE card installed. Support for multiple cameras is easily achieved using a Gigabit Ethernet switch. However, the GigE card supplied with the camera is recognized as a public connection to the network; institutions with strict policies only allow registered devices and trusted connections. For any questions regarding using our GigE card at your institution, please contact your IT department.
Scientific Camera Interface Summary
| Interface | USB 3.0 | Gigabit Ethernet |
|---|---|---|
| Interface Image (Click to Enlarge) |  |
 |
| Maximum Cable Length | 3 m | 100 m |
| Maximum Bandwidtha | 320 MB/s | 100 MB/s |
| Support for Multiple Cameras | Via Multiple USB 3.0 Ports or Hub | Via Switch Topology (Click for Details)b |
| Available Cameras | 200 Frames per Second Scientific-Grade CCD Cameras 1.4 Megapixel Scientific-Grade CCD Cameras 4 Megapixel Scientific-Grade CCD Cameras 8 Megapixel Scientific-Grade CCD Cameras |
|
{kind=link}
Triggered Camera Operation
Our scientific cameras have three externally triggered operating modes: streaming overlapped exposure, asynchronous triggered acquisition, and bulb exposure driven by an externally generated trigger pulse. The trigger modes operate independently of the readout (e.g., 20 or 40 MHz; binning) settings as well as gain and offset. Figures 1 through 3 show the timing diagrams for these trigger modes, assuming an active low external TTL trigger.

Click to Enlarge
Figure 1: Streaming overlapped exposure mode. When the external trigger goes low, the exposure begins, and continues for the software-selected exposure time, followed by the readout. This sequence then repeats at the set time interval. Subsequent external triggers are ignored until the camera operation is halted.

Click to Enlarge
Figure 2: Asynchronous triggered acquisition mode. When the external trigger signal goes low, an exposure begins for the preset time, and then the exposure is read out of the camera. During the readout time, the external trigger is ignored. Once a single readout is complete, the camera will begin the next exposure only when the external trigger signal goes low.

Click to Enlarge
Figure 3: Bulb exposure mode. The exposure begins when the external trigger signal goes low and ends when the external trigger signal goes high. Trigger signals during camera readout are ignored.

Figure 4: The ThorCam Camera Settings window. The red and blue highlighted regions indicate the trigger settings as described in the text.
External triggering enables these cameras to be easily integrated into systems that require the camera to be synchronized to external events. The Strobe Output goes high to indicate exposure; the strobe signal may be used in designing a system to synchronize external devices to the camera exposure. External triggering requires a connection to the auxiliary port of the camera. We offer the 8050-CAB1 auxiliary cable as an optional accessory. Two options are provided to "break out" individual signals. The TSI-IOBOB provides SMA connectors for each individual signal. Alternately, the TSI-IOBOB2 also provides the SMA connectors with the added functionality of a shield for Arduino boards that allows control of other peripheral equipment. More details on these three optional accessories are provided below.
Trigger settings are adjusted using the ThorCam software. Figure 4 shows the Camera Settings window, with the trigger settings highlighted with red and blue squares. Settings can be adjusted as follows:
- "HW Trigger" (Red Highlight) Set to "None": The camera will simply acquire the number of frames in the "Frames per Trigger" box when the capture button is pressed in ThorCam.
- "HW Trigger" Set to "Standard": There are Two Possible Scenarios:
- "Frames per Trigger" (Blue Highlight) Set to Zero or >1: The camera will operate in streaming overlaped exposure mode (Figure 1).
- "Frames per Trigger" Set to 1: Then the camera will operate in asynchronous triggered acquisition mode (Figure 2).
- "HW Trigger" Set to "Bulb (PDX) Mode": The camera will operate in bulb exposure mode, also known as Pulse Driven Exposure (PDX) mode (Figure 3).
In addition, the polarity of the trigger can be set to "On High" (exposure begins on the rising edge) or "On Low" (exposure begins on the falling edge) in the "HW Trigger Polarity" box (highlighted in red in Figure 4).
Example Camera Triggering Configuration using Scientific Camera Accessories

Figure 5: A schematic showing a system using the TSI-IOBOB2 to facilitate system integration and control.
As an example of how camera triggering can be integrated into system control is shown in Figure 5. In the schematic, the camera is connected to the TSI-IOBOB2 break-out board / shield for Arduino using a 8050-CAB1 cable. The pins on the shield can be used to deliver signals to simultaneously control other peripheral devices, such as light sources, shutters, or motion control devices. Once the control program is written to the Arduino board, the USB connection to the host PC can be removed, allowing for a stand-alone system control platform; alternately, the USB connection can be left in place to allow for two-way communication between the Arduino and the PC. Configuring the external trigger mode is done using ThorCam as described above.

Insights into Mounting Lenses to Thorlabs' Scientific Cameras
Scroll down to read about compatibility between lenses and cameras of different mount types, with a focus on Thorlabs' scientific cameras.
- Can C-mount and CS-mount cameras and lenses be used with each other?
- Do Thorlabs' scientific cameras need an adapter?
- Why can the FFD be smaller than the distance separating the camera's flange and sensor?
Click here for more insights into lab practices and equipment.
Can C-mount and CS-mount cameras and lenses be used with each other?

Click to Enlarge
Figure 1: C-mount lenses and cameras have the same flange focal distance (FFD), 17.526 mm. This ensures light through the lens focuses on the camera's sensor. Both components have 1.000"-32 threads, sometimes referred to as "C-mount threads".

Click to Enlarge
Figure 2: CS-mount lenses and cameras have the same flange focal distance (FFD), 12.526 mm. This ensures light through the lens focuses on the camera's sensor. Their 1.000"-32 threads are identical to threads on C-mount components, sometimes referred to as "C-mount threads."
The C-mount and CS-mount camera system standards both include 1.000"-32 threads, but the two mount types have different flange focal distances (FFD, also known as flange focal depth, flange focal length, register, flange back distance, and flange-to-film distance). The FFD is 17.526 mm for the C-mount and 12.526 mm for the CS-mount (Figures 1 and 2, respectively).
Since their flange focal distances are different, the C-mount and CS-mount components are not directly interchangeable. However, with an adapter, it is possible to use a C-mount lens with a CS-mount camera.
Mixing and Matching
C-mount and CS-mount components have identical threads, but lenses and cameras of different mount types should not be directly attached to one another. If this is done, the lens' focal plane will not coincide with the camera's sensor plane due to the difference in FFD, and the image will be blurry.
With an adapter, a C-mount lens can be used with a CS-mount camera (Figures 3 and 4). The adapter increases the separation between the lens and the camera's sensor by 5.0 mm, to ensure the lens' focal plane aligns with the camera's sensor plane.
In contrast, the shorter FFD of CS-mount lenses makes them incompatible for use with C-mount cameras (Figure 5). The lens and camera housings prevent the lens from mounting close enough to the camera sensor to provide an in-focus image, and no adapter can bring the lens closer.
It is critical to check the lens and camera parameters to determine whether the components are compatible, an adapter is required, or the components cannot be made compatible.
1.000"-32 Threads
Imperial threads are properly described by their diameter and the number of threads per inch (TPI). In the case of both these mounts, the thread diameter is 1.000" and the TPI is 32. Due to the prevalence of C-mount devices, the 1.000"-32 thread is sometimes referred to as a "C-mount thread." Using this term can cause confusion, since CS-mount devices have the same threads.
Measuring Flange Focal Distance
Measurements of flange focal distance are given for both lenses and cameras. In the case of lenses, the FFD is measured from the lens' flange surface (Figures 1 and 2) to its focal plane. The flange surface follows the lens' planar back face and intersects the base of the external 1.000"-32 threads. In cameras, the FFD is measured from the camera's front face to the sensor plane. When the lens is mounted on the camera without an adapter, the flange surfaces on the camera front face and lens back face are brought into contact.

Click to Enlarge
Figure 5: A CS-mount lens is not directly compatible with a C-mount camera, since the light focuses before the camera's sensor. Adapters are not useful, since the solution would require shrinking the flange focal distance of the camera (blue arrow).

Click to Enlarge
Figure 4: An adapter with the proper thickness moves the C-mount lens away from the CS-mount camera's sensor by an optimal amount, which is indicated by the length of the purple arrow. This allows the lens to focus light on the camera's sensor, despite the difference in FFD.

Click to Enlarge
Figure 3: A C-mount lens and a CS-mount camera are not directly compatible, since their flange focal distances, indicated by the blue and yellow arrows, respectively, are different. This arrangement will result in blurry images, since the light will not focus on the camera's sensor.
Date of Last Edit: July 21, 2020
Do Thorlabs' scientific cameras need an adapter?

Click to Enlarge
Figure 6: An adapter can be used to optimally position a C-mount lens on a camera whose flange focal distance is less than 17.526 mm. This sketch is based on a Zelux camera and its SM1A10Z adapter.

Click to Enlarge
Figure 7: An adapter can be used to optimally position a CS-mount lens on a camera whose flange focal distance is less than 12.526 mm. This sketch is based on a Zelux camera and its SM1A10 adapter.
All Kiralux™ and Quantalux® scientific cameras are factory set to accept C-mount lenses. When the attached C-mount adapters are removed from the passively cooled cameras, the
The SM1 threads integrated into the camera housings are intended to facilitate the use of lens assemblies created from Thorlabs components. Adapters can also be used to convert from the camera's C-mount configurations. When designing an application-specific lens assembly or considering the use of an adapter not specifically designed for the camera, it is important to ensure that the flange focal distances (FFD) of the camera and lens match, as well as that the camera's sensor size accommodates the desired field of view (FOV).
Made for Each Other: Cameras and Their Adapters
Fixed adapters are available to configure the Zelux cameras to meet C-mount and CS-mount standards (Figures 6 and 7). These adapters, as well as the adjustable C-mount adapters attached to the passively cooled Kiralux and Quantalux cameras, were designed specifically for use with their respective cameras.
While any adapter converting from SM1 to
The position of the lens' focal plane is determined by a combination of the lens' FFD, which is measured in air, and any refractive elements between the lens and the camera's sensor. When light focused by the lens passes through a refractive element, instead of just travelling through air, the physical focal plane is shifted to longer distances by an amount that can be calculated. The adapter must add enough separation to compensate for both the camera's FFD, when it is too short, and the focal shift caused by any windows or filters inserted between the lens and sensor.
Flexiblity and Quick Fixes: Adjustable C-Mount Adapter
Passively cooled Kiralux and Quantalux cameras consist of a camera with SM1 internal threads, a window or filter covering the sensor and secured by a retaining ring, and an adjustable C-mount adapter.
A benefit of the adjustable C-mount adapter is that it can tune the spacing between the lens and camera over a 1.8 mm range, when the window / filter and retaining ring are in place. Changing the spacing can compensate for different effects that otherwise misalign the camera's sensor plane and the lens' focal plane. These effects include material expansion and contraction due to temperature changes, positioning errors from tolerance stacking, and focal shifts caused by a substitute window or filter with a different thickness or refractive index.
Adjusting the camera's adapter may be necessary to obtain sharp images of objects at infinity. When an object is at infinity, the incoming rays are parallel, and location of the focus defines the FFD of the lens. Since the actual FFDs of lenses and cameras may not match their intended FFDs, the focal plane for objects at infinity may be shifted from the sensor plane, resulting in a blurry image.
If it is impossible to get a sharp image of objects at infinity, despite tuning the lens focus, try adjusting the camera's adapter. This can compensate for shifts due to tolerance and environmental effects and bring the image into focus.
Date of Last Edit: Aug. 2, 2020
Why can the FFD be smaller than the distance separating the camera's flange and sensor?

Click to Enlarge
Figure 9: Refraction causes the ray's angle with the optical axis to be shallower in the medium than in air (θm vs. θo ), due to the differences in refractive indices (nm vs. no ). After travelling a distance d in the medium, the ray is only hm closer to the axis. Due to this, the ray intersects the axis Δf beyond the f point.;

Click to Enlarge
Figure 8: A ray travelling through air intersects the optical axis at point f. The ray is ho closer to the axis after it travels across distance d. The refractive index of the air is no .
| Example of Calculating Focal Shift | |||
|---|---|---|---|
| Known Information | |||
| C-Mount FFD | f | 17.526 mm | |
| Total Glass Thickness | d | ~1.6 mm | |
| Refractive Index of Air | no | 1 | |
| Refractive Index of Glass | nm | 1.5 | |
| Lens f-Number | f / N | f / 1.4 | |
| Parameter to Calculate |
Exact Equations | Paraxial Approximation |
|
| θo | 20° | ||
| ho | 0.57 mm | --- | |
| θm | 13° | --- | |
| hm | 0.37 mm | --- | |
| Δf | 0.57 mm | 0.53 mm | |
| f + Δf | 18.1 mm | 18.1 mm | |
| Equations for Calculating the Focal Shift (Δf ) | ||
|---|---|---|
| Angle of Ray in Air, from Lens f-Number ( f / N ) |  |
|
| Change in Distance to Axis, Travelling through Air (Figure 8) |  |
|
| Angle of Ray to Axis, in the Medium (Figure 9) |
 |
|
| Change in Distance to Axis, Travelling through Optic (Figure 9) |  |
|
| Focal Shift Caused by Refraction through Medium (Figure 9) | Exact Calculation |
 |
| Paraxial Approximation |
 |
|

Click to Enlarge
Figure 11: Tolerance and / or temperature effects may result in the lens and camera having different FFDs. If the FFD of the lens is shorter, images of objects at infinity will be excluded from the focal range. Since the system cannot focus on them, they will be blurry.

Click to Enlarge
Figure 10: When their flange focal distances (FFD) are the same, the camera's sensor plane and the lens' focal plane are perfectly aligned. Images of objects at infinity coincide with one limit of the system's focal range.
Flange focal distance (FFD) values for cameras and lenses assume only air fills the space between the lens and the camera's sensor plane. If windows and / or filters are inserted between the lens and camera sensor, it may be necessary to increase the distance separating the camera's flange and sensor planes to a value beyond the specified FFD. A span equal to the FFD may be too short, because refraction through windows and filters bends the light's path and shifts the focal plane farther away.
If making changes to the optics between the lens and camera sensor, the resulting focal plane shift should be calculated to determine whether the separation between lens and camera should be adjusted to maintain good alignment. Note that good alignment is necessary for, but cannot guarantee, an in-focus image, since new optics may introduce aberrations and other effects resulting in unacceptable image quality.
A Case of the Bends: Focal Shift Due to Refraction
While travelling through a solid medium, a ray's path is straight (Figure 8). Its angle
When an optic with plane-parallel sides and a higher refractive index
While travelling through the optic, the ray approaches the optical axis at a slower rate than a ray travelling the same distance in air. After exiting the optic, the ray's angle with the axis is again θo , the same as a ray that did not pass through the optic. However, the ray exits the optic farther away from the axis than if it had never passed through it. Since the ray refracted by the optic is farther away, it crosses the axis at a point shifted Δf beyond the other ray's crossing. Increasing the optic's thickness widens the separation between the two rays, which increases Δf.
To Infinity and Beyond
It is important to many applications that the camera system be capable of capturing high-quality images of objects at infinity. Rays from these objects are parallel and focused to a point closer to the lens than rays from closer objects (Figure 9). The FFDs of cameras and lenses are defined so the focal point of rays from infinitely distant objects will align with the camera's sensor plane. When a lens has an adjustable focal range, objects at infinity are in focus at one end of the range and closer objects are in focus at the other.
Different effects, including temperature changes and tolerance stacking, can result in the lens and / or camera not exactly meeting the FFD specification. When the lens' actual FFD is shorter than the camera's, the camera system can no longer obtain sharp images of objects at infinity (Figure 11). This offset can also result if an optic is removed from between the lens and camera sensor.
An approach some lenses use to compensate for this is to allow the user to vary the lens focus to points "beyond" infinity. This does not refer to a physical distance, it just allows the lens to push its focal plane farther away. Thorlabs' Kiralux™ and Quantalux® cameras include adjustable C-mount adapters to allow the spacing to be tuned as needed.
If the lens' FFD is larger than the camera's, images of objects at infinity fall within the system's focal range, but some closer objects that should be within this range will be excluded. This situation can be caused by inserting optics between the lens and camera sensor. If objects at infinity can still be imaged, this can often be acceptable.
Not Just Theory: Camera Design Example
The C-mount, hermetically sealed, and TE-cooled Quantalux camera has a fixed 18.1 mm spacing between its flange surface and sensor plane. However, the FFD (f ) for C-mount camera systems is 17.526 mm. The camera's need for greater spacing becomes apparent when the focal shift due to the window soldered into the hermetic cover and the glass covering the sensor are taken into account. The results recorded in the table beneath Figure 9 show that both exact and paraxial equations return a required total spacing of 18.1 mm.
Date of Last Edit: July 31, 2020

About Thorlabs Scientific Imaging
Thorlabs Scientific Imaging (TSI) is a multi-disciplinary team dedicated to solving the most challenging imaging problems. We design and manufacture low-noise, high performance scientific cameras, interface devices, and software at our facility in Austin, Texas.
A Message from TSI's General Manager
As a researcher, you are accustomed to solving difficult problems but may be frustrated by the inadequacy of the available instrumentation and tools. The product development team at Thorlabs Scientific Imaging is continually looking for new challenges to push the boundaries of Scientific Cameras using various sensor technologies. We welcome your input in order to leverage our team of senior research and development engineers to help meet your advanced imaging needs.
Thorlabs' purpose is to support advances in research through our product offerings. Your input will help us steer the direction of our scientific camera product line to support these advances. If you have a challenging application that requires a more advanced scientific camera than is currently available, I would be excited to hear from you.

Sincerely,
Jason Mills
General Manager
Thorlabs Scientific Imaging
| Posted Comments: | |
Yanmei Cao
(posted 2019-05-10 06:09:10.88) Hi! I have two questions:
1. the pixel size is 3296 x 2472, then what is the exact area size it capture?
2. Sometimes the software shows no image saved and the pixel either X or Y is 0, no live. llamb
(posted 2019-05-13 02:08:21.0) Thank you for contacting Thorlabs. The active imaging area for this camera is 18.13 mm x 13.60 mm (Horizontal x Vertical), since each pixel is a 5.5 µm square size. I have reached out to you directly to troubleshoot further. artco .
(posted 2019-04-12 18:45:35.79) Dears. Thanks for your prompt action. I connected 8051M-USB Camera to a USB 3.0 port of my system pc and ThorCam finds it well. But SDK function - GetNumberofCameras() is returning 0.
Please let me know when can this happen. Thank you YLohia
(posted 2019-04-15 08:35:07.0) Hello, you have been in contact with us via email regarding this issue. We will continue to communicate through the same channel for support in this matter. mirtruth
(posted 2018-04-23 07:48:11.927) Dear ThorLabs,
What is the ECCN number for 8051M-USB ?
Is it EAR99 ?
Thank you! YLohia
(posted 2018-04-23 08:40:00.0) Hello, thank you for contacting Thorlabs. Yes, this camera is indeed EAR99. hsynvnvural
(posted 2017-09-25 13:13:45.43) What is the operating temperature range of 8051M-G? tfrisch
(posted 2017-11-14 02:23:11.0) Hello, thank you for contacting Thorlabs. On the cooler end, the limit will most often be condensation. Always operate in a non-condensing regime. I have heard of use as low as 5°C ambient. As for the warmer end, that is a more application dependent question. I will reach out to you directly to discuss in what ways performance could change and whether that would be within the tolerances of your application. jerry.tsai
(posted 2016-08-31 16:35:54.51) Dear
I am Jerry, I come from Taiwan, I buy your product Camera"8050M-USB". I want to use by sdk with c++, my computer is x64, I can build Success, but the program initial "tsi_sdk = get_tsi_sdk("tsi_sdk.dll")" can't work, it return
tsi_sdk=0x00000000, and I find the tsi_sdk.dll is x64 version. Can you Help me to Complete this program? Like give me the tsi_sdk.dll 32 version. Thank you so much!!!!! tfrisch
(posted 2016-09-07 11:55:26.0) Hello, thank you for contacting Thorlabs. I have contacted you directly about your application. bob.ke
(posted 2016-08-29 11:46:28.83) Dear Sir:
I come from Chroma ATE Inc.
I have some question for this camera:(8050M-GE)
Please provide
1.C++ Smaple Code
2.Initial Camera(How to allocate memory?)
Question:
1.How to get lossless 14 bit Image (tiff)? or raw data?
2.How to know the capture is finished? any callback function can used? tfrisch
(posted 2016-09-01 10:57:39.0) Hello, thank you for contacting Thorlabs. We will contact you directly about your application. kbanman
(posted 2015-09-16 16:53:50.597) It is unclear whether or not the 8050M-GE cameras support the GigE Vision interface, as trademarked by AIA (see visiononline.org)
> Thorlabs offers two interface options across our scientific camera product line: Gigabit Ethernet (GigE) and Camera Link.
Whether support is official or unofficial, it would be useful to know which version of the standard is implemented by the 8050M-GE. The GigE Vision interface spec is currently in 2.0, but 1.0 and 1.2 are referenced often as well.
Does the 8050M-GE implement the official GigE Vision specification?
Or is the support not official for whatever reason?
Is a certain subset of the spec implemented?
Regardless, which version should I reference? besembeson
(posted 2015-10-06 05:43:25.0) Response from Bweh at Thorlabs USA: Thank you for your inquiry. We apologize for any confusion. Our Gigabit Ethernet cameras are not compliant with the GigE vision specification in any way, therefore we make no claims as such. You can interface with our cameras through our SDK, which covers Gigabit Ethernet and Camera Link. |

Thorlabs offers four families of scientific cameras: Zelux™, Kiralux®, Quantalux®, and Scientific CCD. Zelux cameras are designed for general-purpose imaging and provide high imaging performance while maintaining a small footprint. Kiralux cameras have CMOS sensors in monochrome, color, NIR-enhanced, or polarization-sensitive versions and are available in compact, passively cooled housings; the CC505MU camera incorporates a hermetically sealed, TE-cooled housing. The polarization-sensitive Kiralux camera incorporates an integrated micropolarizer array that, when used with our ThorCam™ software package, captures images that illustrate degree of linear polarization, azimuth, and intensity at the pixel level. Our Quantalux monochrome sCMOS cameras feature high dynamic range combined with extremely low read noise for low-light applications. They are available in either a compact, passively cooled housing or a hermetically sealed, TE-cooled housing. We also offer scientific CCD cameras with a variety of features, including versions optimized for operation at UV, visible, or NIR wavelengths; fast-frame-rate cameras; TE-cooled or non-cooled housings; and versions with the sensor face plate removed. The tables below provide a summary of our camera offerings.
| Compact Scientific Cameras | |||||||
|---|---|---|---|---|---|---|---|
| Camera Type | Zelux™ CMOS | Kiralux® CMOS | Quantalux® sCMOS | ||||
| 1.6 MP | 1.3 MP | 2.3 MP | 5 MP | 8.9 MP | 12.3 MP | 2.1 MP | |
| Item # | Monochrome: CS165MUa Color: CS165CUa |
Mono.: CS135MU Color: CS135CU NIR-Enhanced Mono.: CS135MUN |
Mono.: CS235MU Color: CS235CU |
Mono., Passive Cooling: CS505MU Mono., Active Cooling: CC505MU Color: CS505CU Polarization: CS505MUP |
Mono.: CS895MU Color: CS895CU |
Mono.: CS126MU Color: CS126CU |
Monochrome, Passive Cooling: CS2100M-USB Active Cooling: CC215MU |
| Product Photos (Click to Enlarge) |
 |
 |
 |
||||
| Electronic Shutter | Global Shutter | Global Shutter | Rolling Shutterb | ||||
| Sensor Type | CMOS | CMOS | sCMOS | ||||
| Number of Pixels (H x V) |
1440 x 1080 | 1280 x 1024 | 1920 x 1200 | 2448 x 2048 | 4096 x 2160 | 4096 x 3000 | 1920 x 1080 |
| Pixel Size | 3.45 µm x 3.45 µm | 4.8 µm x 4.8 µm | 5.86 µm x 5.86 µm | 3.45 µm x 3.45 µm | 5.04 µm x 5.04 µm | ||
| Optical Format |
1/2.9" (6.2 mm Diag.) |
1/2" (7.76 mm Diag.) |
1/1.2" (13.4 mm Diag.) |
2/3" (11 mm Diag.) |
1" (16 mm Diag.) |
1.1" (17.5 mm Diag.) |
2/3" (11 mm Diag.) |
| Peak Quantum Efficiency (Click for Plot) |
Monochrome: 69% at 575 nm Color: Click for Plot |
Monochrome: 59% at 550 nm Color: Click for Plot NIR: 60% at 600 nm |
Monochrome: 78% at 500 nm Color: Click for Plot |
Monochrome & Polarization: 72% (525 to 580 nm) Color: Click for Plot |
Monochrome: 72% (525 to 580 nm) Color: Click for Plot |
Monochrome: 72% (525 to 580 nm) Color: Click for Plot |
Monochrome: 61% (at 600 nm) |
| Max Frame Rate (Full Sensor) |
34.8 fps | 92.3 fps | 39.7 fps | 35 fps | 20.8 fps | 14.6 fps | 50 fps |
| Read Noise | <4.0 e- RMS | <7.0 e- RMS | <7.0 e- RMS | <2.5 e- RMS | <1 e- Median RMS; <1.5 e- RMS | ||
| Digital Output |
10 Bit (Max) | 10 Bit (Max) | 12 Bit (Max) | 16 Bit (Max) | |||
| PC Interface | USB 3.0 | ||||||
| Available Fanless Cooling |
N/A | N/A | N/A | 0 °C at 20 °C Ambient (CC505MU Only) | N/A | 0 °C at 20 °C Ambient (CC215MU Only) |
|
| Housing Size (Click for Details) |
0.59" x 1.72" x 1.86" (15.0 x 43.7 x 47.2 mm3) |
Passively Cooled CMOS Camera TE-Cooled CMOS Camera |
Passively Cooled sCMOS Camera TE-Cooled sCMOS Camera |
||||
| Typical Applications |
General Purpose Imaging, Brightfield Microscopy, Machine Vision & Robotics, UAV, Drone, & Handheld Imaging, Inspection, Monitoring |
VIS/NIR Imaging, Electrophysiology/Brain Slice Imaging, Materials Inspection, Multispectral Imaging, Ophthalmology/Retinal Imaging, Vascular Imaging, Laser Speckle Imaging, Semiconductor Inspection, Fluorescence Microscopy, Brightfield Microscopy |
Fluorescence Microscopy, Immunohistochemistry, Machine Vision, Inspection, General Purpose Imaging |
Mono. & Color: Fluorescence Microscopy, Immunohistochemistry, Machine Vision & Inspection Polarization: Machine Vision & Inspection, Transparent Material Detection, Surface Reflection Reduction |
Fluorescence Microscopy, Immunohistochemistry, Large FOV Slide Imaging, Machine Vision, Inspection |
Fluorescence Microscopy, VIS/NIR Imaging, Quantum Dots, Autofluorescence, Materials Inspection, Multispectral Imaging |
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scientific CCD Cameras | |||||||
|---|---|---|---|---|---|---|---|
| Camera Type | Fast Frame Rate VGA CCD |
1.4 MP CCD | 4 MP CCD | 8 MP CCD | |||
| Item # Prefix | Monochrome: 340M |
UV-Enhanced Monochrome: 340UV |
Monochrome: 1501M Color: 1501C |
Monochrome: 4070M Color: 4070C |
Monochrome: 8051M Color: 8051C |
Monochrome, No Sensor Face Plate: S805MU |
|
| Product Photo (Click to Enlarge) |
 |
 |
|
|
 |
||
| Electronic Shutter | Global Shutter | ||||||
| Sensor Type | CCD | ||||||
| Number of Pixels (H x V) |
640 x 480 | 1392 x 1040 | 2048 x 2048 | 3296 x 2472 | |||
| Pixel Size | 7.4 µm x 7.4 µm | 6.45 µm x 6.45 µm | 7.4 µm x 7.4 µm | 5.5 µm x 5.5 µm | |||
| Optical Format | 1/3" (5.92 mm Diagonal) | 2/3" (11 mm Diagonal) | 4/3" (21.4 mm Diagonal) | 4/3" (22 mm Diagonal) | |||
| Peak QE (Click for Plot) |
55% at 500 nm |
10% at 485 nm |
Monochrome: 60% at 500 nm Color: Click for Plot |
Monochrome: 52% at 500 nm Color: Click for Plot |
Monochrome: 51% at 460 nm Color: Click for Plot |
51% at 460 nm | |
| Max Frame Rate (Full Sensor) |
200.7 fps (at 40 MHz Dual-Tap Readout) |
23 fps (at 40 MHz Single-Tap Readout) |
25.8 fps (at 40 MHz Quad-Tap Readout)a |
17.1 fps (at 40 MHz Quad-Tap Readout)b |
17.1 fps (at 40 MHz Quad-Tap Readout) |
||
| Read Noise | <15 e- at 20 MHz | <7 e- at 20 MHz (Standard Models) <6 e- at 20 MHz (-TE Models) |
<12 e- at 20 MHz | <10 e- at 20 MHz | |||
| Digital Output (Max) | 14 Bitc | 14 Bit | 14 Bitc | 14 Bit | |||
| Available Fanless Cooling |
Passive Thermal Management | -20 °C at 20 °C Ambient Temperature | -10 °C at 20 °C Ambient | Passive Thermal Management | |||
| Available PC Interfaces |
USB 3.0 or Gigabit Ethernet | USB 3.0 | |||||
| Housing Dimensions (Click for Details) |
Non-Cooled Scientific CCD Camera |
Cooled Scientific CCD Camera Non-Cooled Scientific CCD Camera |
No Face Plate Scientific CCD Camera |
||||
| Typical Applications | Ca++ Ion Imaging, Particle Tracking, Flow Cytometry, SEM/EBSD, UV Inspection |
Fluorescence Microscopy, VIS/NIR Imaging, Quantum Dots, Multispectral Imaging, Immunohistochemistry (IHC), Retinal Imaging |
Fluorescence Microscopy, Transmitted Light Microscopy, Whole-Slide Microscopy, Electron Microscopy (TEM/SEM), Inspection, Material Sciences |
Fluorescence Microscopy, Whole-Slide Microscopy, Large FOV Slide Imaging, Histopathology, Inspection, Multispectral Imaging, Immunohistochemistry (IHC) |
Beam Profiling & Characterization, Interferometry, VCSEL Inspection, Quantitative Phase-Contrast Microscopy, Ptychography, Digital Holographic Microscopy |
||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}