 Products Home / Actuators, Adjusters, & Transducers / Motorized Actuators / 10 mm (0.39") Travel or Less Motorized Actuators
Products Home / Actuators, Adjusters, & Transducers / Motorized Actuators / 10 mm (0.39") Travel or Less Motorized Actuators10 mm (0.39") Travel or Less Motorized Actuators

- High-Resolution Piezo Inertia, Stepper, and DC Servo Actuators
- Compatible with a Wide Range of Stages
- Velocities up to 5 mm/s
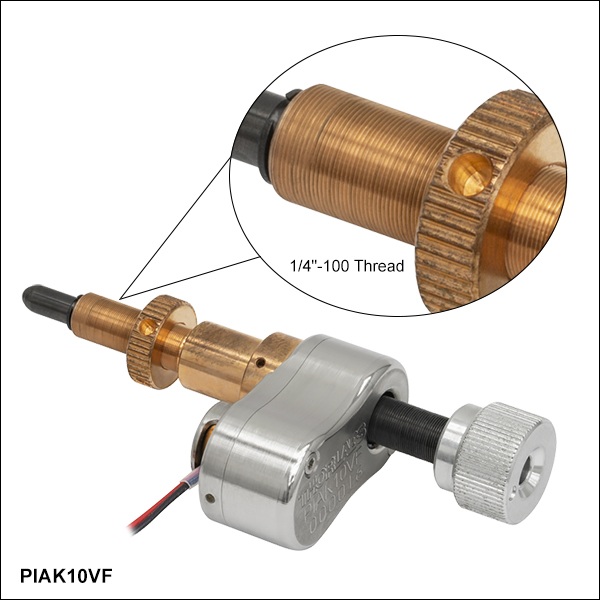
PIAK10VF
10 mm Travel
Piezo Inertia Actuator,
Vacuum Compatible
Z806
6 mm Travel, DC Actuator
DRV208
8 mm Travel,
Stepper Motor Actuator
ZFS06
6 mm Travel, Compact
Stepper Motor Actuator











Please Wait

 Zoom
Zoom
Required Controller:
KST101
- 49,152 Microsteps per Revolution
- 15 V Output at 12 W
- Trapezoidal and
'S-Curve' Velocity Profiles
Features
- Compact Package: 86.5 mm (3.40") Long, Fully Retracted
- Manual Adjustment via Rear-Located Thumbscrew
- Non-Rotating Drive Tip
- Compatible with Mirror Mounts and Translation Stages with 1/4"-80 Threads
- Also Available in 13 mm and 25 mm Travel Versions
Our ZFS06 Motorized Actuator provides smooth, precise linear motion control in a sleek, compact package measuring just 86.5 mm (3.40") in length when fully retracted. This compact profile reduces the distance between the end of the actuator and optomechanical components, keeping the center of mass closer to the contact point than the ZST206 actuator featured above. This actuator has a 1/4"-80 threaded barrel that can be mounted to any manual mirror mount or positioning stage equipped with 1/4"-80 threads.
Powered by a small-diameter, two-phase, bi-polar stepper motor, this actuator operates at speeds of up to 2.0 mm/s. The non-rotating drive tip reduces wear and friction and improves smoothness of motion by removing rotational contact at the tip. If power is not supplied to the actuator, manual adjustment is achievable using the rear-located thumbscrew. The actuator motor can be damaged if this thumbscrew is rotated while power is being supplied to the motor.
Our ZFS06 actuator incorporates a stepper motor that provides sufficient torque for loads up to 40 N (8.99 lbs). The actuator allows for very small step sizes over the entire travel range, delivering greater flexibility with low (<15 µm) backlash and fine resolution. The design incorporates a 400:9 gear reduction head which, when combined with the 49,152 microsteps per revolution offered by the KST101 stepper motor driver, gives a theoretical travel per microstep of 0.46 nm (see the Calculations tab for details).
| Item # | ZFS06 |
|---|---|
| Travel | 6 mm (0.24") |
| Backlasha | <15 µm |
| Bidirectional Repeatability | <5.0 µm |
| Home Location Accuracy | <5.0 µm |
| Maximum Load Capacity | 40 N (8.99 lbs) |
| Velocity | 2.0 mm/s (Max) |
| Acceleration | 10 mm/s2 (Max) |
| Gearbox Ratio | 400:9 (Approx. 44:1) |
| Limit Switches | Hall Effect |
| Lead Screw Pitch | 1.0 mm |
| Motor Type | 2-Phase Stepper |
| Microsteps per Revolution of the Motorb | 24 Full Steps, 2048 µsteps per Full Step 49,152 µsteps per Revolution |
| Calculated Minimum Incremental Motionc | 0.46 nm |
| Operating Temperature | 5 to 40 °C (41 to 104 °F) |
| Dimensions (L x W x H) | 86.5 mm x 35.0 mm x 19.0 mm (3.40" x 1.38" x 0.75") |
| Cable Length | 0.6 m (2 ft) |
| Connector | HDDB15 |
| Required Controller | KST101 |
Hall effect limit switches prevent the unit from being overdriven and provide homing capability with an accuracy of <5.0 μm. The ZFS series actuators come with 0.6 m (2 ft) of cable terminated in a 15-pin D-Type connector (see the Pin Diagrams tab) that is compatible with our KST101 stepper motor controller.
The ZFS06 has been designed specifically to replace the manual adjusters in stages and mirror mounts that have 1/4"-80 threaded fittings, particularly in applications where space is tight. Simply remove the existing manual adjuster from the mount and screw in the ZFS06 actuator. Two ZFS06 motorized actuators replace the thumbscrews of the KM100 in the image below.

How to calculate the linear displacement per microstep
The ZFS series of motors has 24 full steps per revolution, and when driven by the KST101 drivers, there are 2048 microsteps per full step, giving 49,152 microsteps per revolution of the motor. The output shaft of the motor goes into a 400:9 gear head. This requires the motor to rotate 44.445 times to rotate the 1.0 mm pitch lead screw one revolution. The end result is the lead screw advances by 1.0 mm.
Linear displacement of the lead screw per microstep:
Number of Microsteps x Gearbox Ratio = 49,152 x 44.445 = 2184560.64
The linear displacement of the lead screw per microstep is
1.0 mm / 2184560.64 = 0.46 x 10-6 mm = 0.46 nm
Pin Diagram

High-Density D-Type Male 15 Pin Connector
Connector Pin Out
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Ground | 8 | Reserved for Future Use |
| 2 | CCW Limit Switch | 9 | Reserved for Future Use |
| 3 | CW Limit Switch | 10 | Vcc (+5 V DC) |
| 4 | Motor Phase B- | 11 | Reserved for Future Use |
| 5 | Motor Phase B+ | 12 | Reserved for Future Use |
| 6 | Motor Phase A- | 13 | Reserved for Future Use |
| 7 | Motor Phase A+ | 14 | Reserved for Future Use |
| - | - | 15 | Ground |

Click to Enlarge
High-Density D-Type Male 15 Pin Connector
| Posted Comments: | |
| No Comments Posted |

 Zoom
ZoomRequired Controller:
KST101
- 49,152 Microsteps per Revolution
- 15 V Output at 12 W
- Trapezoidal and
'S-Curve' Velocity Profiles
Features
- Non-Rotating Drive Tip
- Bi-Polar Stepper Motor Actuator: 111.0 mm (4.37") Long
- 1/4"-80 Threaded Barrel Mounting
- Compatible with Mirror Mounts and Translation Stages with 1/4"-80 Threads
- Also Available in 13 mm and 25 mm Travel Versions
Our ZST series actuators provide smooth, precise linear motion control in a package measuring 111.0 mm (4.37") in length. Powered by a small-diameter, two-phase, bi-polar stepper motor, this actuator operates at speeds of up to 2.0 mm/s. The non-rotating drive tip reduces wear and friction and improves smoothness of motion by removing rotational contact at the tip. This actuator has a 1/4"-80 threaded barrel that can be mounted to any manual mirror mount or positioning stage equipped with 1/4"-80 threads.
Our ZST200 line of actuators all incorporate a stepper motor that provides sufficient torque for loads up to 40 N (8.99 lbs). The actuator allows for very small step sizes over the entire travel range, delivering greater flexibility with low (<15 µm) backlash and fine resolution. The design incorporates a 41:1 gear reduction head which, when combined with the 49,152 microsteps per revolution offered by the KST101 stepper motor driver, gives a theoretical travel per microstep of 0.5 nm (see the Calculations tab for details).
| Item # | ZST206 |
|---|---|
| Travel | 6 mm (0.24") |
| Backlasha | <15 µm |
| Bidirectional Repeatability | <5.0 µm |
| Home Location Accuracy | <5.0 µm |
| Maximum Load Capacity | 40 N (8.99 lbs) |
| Velocity | 2.0 mm/s (Max) |
| Acceleration | 10 mm/s2 (Max) |
| Gearbox Ratio | 29791:729 (Approx. 41:1) |
| Limit Switches | Hall Effect |
| Lead Screw Pitch | 1.0 mm |
| Motor Type | 2-Phase Stepper |
| Microsteps per Revolution of the Motorb | 24 Full Steps, 2048 µsteps per Full Step 49,152 µsteps per Revolution |
| Calculated Minimum Incremental Motion | 0.5 nm |
| Operating Temperature | 5 to 40 °C (41 to 104 °F) |
| Dimensions (L x W) | 111.0 mm x 19.0 mm (4.37" x 0.75") |
| Cable Length | 0.6 m (2 ft) |
| Connector | HDDB15 |
| Required Controller | KST101 |
Hall effect limit switches prevent the unit from being overdriven and provide homing capability with an accuracy of <5.0 μm. This actuator comes with 0.6 m (2 ft) of cable terminated in a 15-pin D-Type connector that is compatible with our KST101 stepper motor controller.
The ZST206 has been designed specifically to replace the manual adjusters in stages and mirror mounts that have 1/4"-80 threaded fittings. Simply remove the existing manual adjuster from the mount and screw in the ZST206 actuator.

A KM100 mirror mount with the screw adjusters replaced by two ZST206 actuators.
Click to Enlarge
How to calculate the linear displacement per microstep
Each member of the ZST200 series of motors has 24 full steps per revolution, and when driven by the KST101 drivers, there are 2048 microsteps per full step. Hence, there are 49,152 microsteps per revolution of the motor. The output shaft of the motor goes into a 40.866:1 gear head. This requires the motor to rotate 40.866 times to rotate the 1.0 mm pitch lead screw one revolution. The end result is the lead screw advances by 1.0 mm. To calculate the linear displacement of the actuator per microstep, use the following:
Linear displacement of the lead screw per microstep:
Number of Microsteps x Gearbox Ratio = 49,152 x 40.866 = 2,008,645.63
The linear displacement of the lead screw per microstep is
1.0 mm / 2,008,645.63 = 0.49 x 10-6 mm = 0.5 nm
Pin Diagram
High-Density D-Type Male 15 Pin Connector
Connector Pin Out
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Ground | 8 | Reserved for Future Use |
| 2 | CCW Limit Switch | 9 | Reserved for Future Use |
| 3 | CW Limit Switch | 10 | Vcc (+5 V DC) |
| 4 | Motor Phase B- | 11 | Reserved for Future Use |
| 5 | Motor Phase B+ | 12 | Reserved for Future Use |
| 6 | Motor Phase A- | 13 | Reserved for Future Use |
| 7 | Motor Phase A+ | 14 | Reserved for Future Use |
| - | - | 15 | Ground |
Click to Enlarge
High-Density D-Type Male 15 Pin Connector
| Posted Comments: | |
| No Comments Posted |

 Zoom
Zoom
Required Controller:
KDC101
- 34,304 Microsteps per Revolution
- 15 V Output at 2.5 W
- Trapezoidal Velocity Profile
| Item # | Z806 |
|---|---|
| Travel | 6.0 mm (0.24") |
| Backlash | <8 µm |
| Bidirectional Repeatability | <1.5 µm |
| Home Location Accuracy | <2 µm |
| Homing Repeatability | ±1.0 µm |
| Vertical Load Capacity | 4.5 kg (Max) |
| Horizontal Load Capacity | 9 kg (Max) |
| Recommended Vertical Load | <4.0 kg |
| Recommended Horizontal Load | <7.5 kg |
| Velocitya | 2.6 mm/s (Max) |
| Acceleration | 4 mm/s2 (Max) |
| Absolute On-Axis Accuracy | 42 µm |
| Maximum Percentage Accuracy | 0.75% |
| Motor Coil Temperature | 85 °C (Max) |
| Phase to Phase Resistance | 33.0 Ω (Max) |
| Phase to Phase Inductance | 0.6 mH (Max) |
| Limit Switch Life Time | >100,000 Cycles |
| Minimum Achievable Incremental Movement | 0.05 µm |
| Minimum Repeatable Incremental Movement | 0.2 µm |
| Operating Temperature Range | 41° to 104° F (5° to 40° C) |
| Weight | 0.134 kg |
| Motor Typeb | 6 V DC Servo |
| Recommended Controller | KDC101 |
Features
- 6 VDC Servo Actuator
- Sub-Micron Resolution
- Maximum Velocity: 2.3 mm/s
- Drop In Replacement for Most 6 mm Manual Actuators
- Compatible with 1/4"-80 Thread-Fitting Stages and Mounts
- Limit Switches for Zero Datum and Actuator Protection
- Also Available in 12 mm and 25 mm Travel Versions
The Z8 Series of Motorized Actuators are engineered for use with optical positioning devices such as mirror mounts and stages. They offer high resolution in a lightweight package, which makes these actuators ideally suited for demanding optical laboratory automation applications.
Commercial limit switches have been added to provide overdrive protection and accurate home positioning. The incorporated motor is capable of speeds up to 2.3 mm/s. The precision of the encoder (512 counts/rev) results in a minimum resolution of about 29 nm.
The Z806 has been designed specifically to replace the manual adjusters in stages and mirror mounts that have 1/4"-80 threaded fittings. Simply remove the existing manual adjuster from the mount, and screw in our Z8 Actuator. The photo below shows a KM100 mirror mount with one of the screw adjusters replaced by a Z806 actuator.
The KDC101 DC Servo Controller is the required driver for the Z8 series actuators. Please note that previous generation TDC001 units will require a firmware upgrade to V1.0.10 or later, before they can be used with the Z8 series motors. An upgrade is included with the latest APT Server software, which can be downloaded here.
For applications with longer travel requirements, see our 12 mm travel Z812 and 25 mm travel Z825 actuators. We also offer the Z806V vacuum-compatible version, which is rated for use down to 10-6 torr and is shipped with a 1.6' flat ribbon cable, IDC connector, and converter cable for use with the KDC101 controller. See below for more details.

The units are shipped with 1.6' (0.5 m) of cable. A 2.5 m (8 ft) extension cable (PAA632) is available separately.
How to Calculate the Linear Displacement per Encoder Count
For the Z806, there are 512 encoder counts per revolution of the motor. The output shaft of the motor goes into a 67:1 planetary gear head. This requires the motor to rotate 67 times to rotate the 1.0 mm pitch lead screw one revolution. The end result is the lead screw advances by 1.0 mm.
The linear displacement of the actuator per encoder count is given by
512 x 67 = 34,304 encoder counts per revolution of the lead screw,
whereas the linear displacement of the lead screw per encoder count is given by
1.0 mm / 34,304 counts = 2.9 x 10-5 mm (29 nm).
Pin Diagram
High-Density D-Type Male 15 Pin Connector
Connector Pin Out
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground (Limit and Vcc) | 8 | Reserved for Future Use |
| 2 | Forward Limit | 9 | Ident Resistor |
| 3 | Reverse Limit | 10 | Vcc (+5 V DC) |
| 4 | Reserved for Future Use | 11 | Encoder Channel A |
| 5 | Motor (-) | 12 | Reserved for Future Use |
| 6 | Reserved for Future Use | 13 | Encoder Channel B |
| 7 | Motor (+) | 14, 15 | Reserved for Future Use |
Click to Enlarge
High-Density D-Type Male 15 Pin Connector
| Posted Comments: | |
| No Comments Posted |

 Zoom
Zoom| Item # | Z806V |
|---|---|
| Motor Typea | 6 VDC Servo |
| Travel | 6.0 mm (0.24") |
| Backlash | <8 µm |
| Bidirectional Repeatability | <1.5 µm |
| Home Location Accuracy | <2 µm |
| Homing Repeatability | ±1.0 µm |
| Vertical Load Capacity | 4.5 kg (Max) |
| Horizontal Load Capacity | 9 kg (Max) |
| Vertical Load Capacityb | <4.0 kg |
| Horizontal Load Capacityb | <7.5 kg |
| Velocityc | 2.6 mm/s (Max) |
| Acceleration | 4 mm/s2 (Max) |
| Absolute On-Axis Accuracy | 42 µm |
| Percentage Accuracy | 0.82% (Max) |
| Motor Coil Temperature | 85 °C (Max) |
| Limit Switch Life Time | >100,000 Cycles |
| Minimum Achievable Incremental Movement | 0.05 µm |
| Minimum Repeatable Incremental Movement | 0.2 µm |
| Operating Temperature Range | 41 to 104 °F (5 to 40 °C) |
| Vacuum Rating | 10-6 Torr |
| Weight | 0.134 kg |
Features
- 6 VDC Servo Actuator
- Sub-Micron Resolution
- Maximum Velocity: 2.3 mm/s
- Drop In Replacement for Most 6 mm Manual Actuators
- Compatible with 1/4"-80 Thread-Fitting Stages and Mounts
- Limit Switches for Zero Datum and Actuator Protection
- Rated Down To 10-6 Torr
- Also Available in 12 mm and 25 mm Travel Versions
The Z806V offers all the features and specifications of the Z806 described above with the added benefit of being vacuum compatible down to 10-6 Torr. It incorporates vacuum-rated servo motors, phosphorus bronze internal coupling mechanism and mounting bush, and high-vacuum grease.
The Z806V actuator is shipped with a 1.6' (0.5 m) vacuum compatible flat ribbon cable with IDC connector. This cable has a 0.05" (1.27 mm) pitch, 28 AWG stranded conductors and Fluorinated Ethylene Propylene (FEP) insulation. A converter cable for use with the KDC101 controller is also supplied, but it is not vacuum compatible and should only be used outside the chamber.
For applications with longer travel requirements, see our 12 mm travel Z812V and 25 mm travel Z825BV actuators. For vacuum compatible versions of our stages and mirror mounts, please contact Tech Support.
The KDC101 DC Servo Controller is the required driver for the Z8 series actuators. Please note that previous generation TDC001 units will require a firmware upgrade to V1.0.10 or later, before they can be used with the Z8 series motors. An upgrade is included with the latest APT Server software, which can be downloaded here.
Required Controller:
KDC101
- 34,304 Microsteps per Revolution
- 15 V Output at 2.5 W
- Trapezoidal Velocity Profile
How to Calculate the Linear Displacement per Encoder Count
For the Z806V, there are 512 encoder counts per revolution of the motor. The output shaft of the motor goes into a 67:1 planetary gear head. This requires the motor to rotate 67 times to rotate the 1.0 mm pitch lead screw one revolution. The end result is the lead screw advances by 1.0 mm.
The linear displacement of the actuator per encoder count is given by
512 x 67 = 34,304 encoder counts per revolution of the lead screw,
whereas the linear displacement of the lead screw per encoder count is given by
1.0 mm / 34,304 counts = 2.9 x 10-5 mm (29 nm).
The vacuum-compatible cable integrated with the Z806V is terminated in a Female IDC 10-Pin socket connector. A short converter cable, which adapts this female IDC socket connector to a D-Type male HD15 pin connector, is included with the Z806V to facilitate connecting the actuator to the recommended KDC101 controller. This converter cable, whose terminating connectors are shown at right, is not vacuum compatible. Information describing the pin assignments for both the female IDC socket and Male D-Type HD connector (when it is connected to the female IDC socket connector) follows.
Pin Diagram

10 Pin Female IDC Socket Connector
(Amphenol T812 Series, 2.54 mm Pitch)

Female IDC 10-Pin Connector Pin Out
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor (+ve) (6 V)a | 6 | Motor (-ve) (6 V)a |
| 2 | Vcc (+5 V) | 7 | Limit Ground |
| 3 | Encoder Channel A | 8 | Reverse Limit |
| 4 | Encoder Channel B | 9 | Forward Limit |
| 5 | Ground | 10 | Reserved for Future Use |
Pin Diagram
High-Density D-Type Male 15 Pin Connector
Male HDDB15 Connector Pin Out
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Ground (Limit and Vcc) | 8 | Reserved For Future Use |
| 2 | Forward Limit | 9 | Ident Resistor |
| 3 | Reverse Limit | 10 | Vcc (+5 VDC) |
| 4 | Reserved For Future Use | 11 | Encoder Channel A |
| 5 | Motor (-) | 12 | Reserved for Future Use |
| 6 | Reserved for Future Use | 13 | Encoder Channel B |
| 7 | Motor (+) | 14, 15 | Reserved For Future Use |

Click to Enlarge
Connectors terminating the converter cable. The image on the left shows the high-density D-Type male 15-pin connector, and the image on the right shows the 10-pin male IDC socket connector.
| Posted Comments: | |
| No Comments Posted |

 Zoom
Zoom
Compatible Controller:
BSC201
- 409,600 Microsteps per Revolution
- 48 V Output at 25 W
- Trapezoidal and
'S-Curve' Velocity Profile
| Item # | DRV208 |
|---|---|
| Travel | 8 mm (0.3") |
| Unidirectional Repeatability | 3.6 µm |
| Bidirectional Repeatability | 5.0 µm |
| Absolute Accuracy | 17.1 µm |
| Maximum Force | 180 N |
| Maximum Velocity | 5 mm/s |
| Maximum Acceleration | 5 mm/s2 |
| Full Step Angle | 1.8° |
| Feedback | None |
| Limit Switches | Hall Effect |
| Lead Screw Pitch | 0.5 mm |
| Homing Repeatability | 13.5 µm |
| Motor Type | 2-Phase Stepper |
| Microsteps per Revolution of Leadscrew | 409,600 |
| Compatible Controllers | BSC201 MST602 |
Features
- 8 mm Total Travel
- High Maximum Force of 180 N
- Non-Rotating Drive Tip
- 500 mm (19.7") D-Type Connection Cable Attached
- 3 m Extension Cable Included
- MCA1 and MCA2 Adapters Convert to Ø3/8" or Ø10 mm Mounting Barrel
The DRV208 Modular Stepper Motor Actuator is designed to be used with our 3-axis and 6-axis NanoMax™ flexure stages. The M22 x 0.75 threaded flange interfaces directly with the NanoMax stage, making it easy to select an actuator for each axis based on the user's requirements. Using the MCA1 or MCA2 quick-connect adapters, this actuator can also be fitted to a stage with standard Ø3/8" or Ø10 mm mounting clamps, respectively.
This actuator features an 8 mm travel range and is capable of speeds up to 5 mm/s. The powerful stepper motor driver has a maximum force of 180 N.
The knurled knob on the rear shaft of the motor can function as a manual adjuster when the actuator is powered down. Note that in an open-loop system, manually adjusting the actuator position will desynchronize the actuator from the position display in the control software. This can be corrected by homing the actuator back to its original zero position, which should be done immediately upon powering up the actuator. The knob also serves as an inertial damper which absorbs vibrations from the stepper motor.
A 500 mm (19.7") cable with a 15-pin D-type connector is attached to the unit to connect the stepper motor to a controller. The unit also comes with a 3 m extension cable (item # PAA613). If a shorter cable is needed, the PAA612 1 m cable is available separately.

Click to Enlarge
The DRV208 can be installed on a 3-axis NanoMax stage.
How to Calculate the Linear Displacement per Microstep
The stepper motor used in the DRV208 actuator has 200 full steps per revolution of the motor. Each full step is broken down into 2048 microsteps. There are 409,600 microsteps per revolution of the motor when using the BSC201 controller. The end result is the leadscrew advancing by 0.5 mm. To calculate the linear displacement of the actuator microstep, use the following:
409,600 microsteps per revolution of the lead screw
The linear displacement of the lead screw per microstep is:
0.5 mm / 409,600 = 1.2 x 10-6 mm
To calculate the linear displacment for a full step, substitute 409,600 with 200.
Pin Diagram
High-Density D-Type Male 15 Pin Connector
Connector Pin Out
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Switch 0 V | 9 | For Future Use |
| 2 | Not Connected | 10 | +5 V |
| 3 | CW Limit Switch | 11 | - |
| 4 | Motor Phase B -ve | 12 | - |
| 5 | Motor Phase B +ve | 13 | +5 V |
| 6 | Motor Phase A -ve | 14 | - |
| 7 | Motor Phase A +ve | 15 | Ground |
| 8 | - | - | - |
Click to Enlarge
High-Density D-Type Male 15 Pin Connector
| Posted Comments: | |
guanghai zhang
(posted 2020-05-03 09:19:19.12) Hellow, can this modtor be controler by BCS101, the last generation controlor?
Best,
Weili DJayasuriya
(posted 2020-05-05 04:39:03.0) Thank you for your inquiry. Unfortunately these new motor types are not implemented in our legacy firmware used with BCS101. Sorry alfred
(posted 2016-09-10 13:00:27.96) Dear Sir:
I come from Chroma ATE Inc.
I have some question for this apt™ Stepper Motor Controllers Type:BSC203
with Motor Type :DRV001(see on the motor's connecter)
1.I'd like to know device unit about the motor: (nm/Pulse?)
According to ThorLab official specification value:
a.Minimum Incremental Movement:60nm/pulse.Does device unit?
b.Lead Screw Pitch:0.5mm.Does express motor rotation one circle forward 0.5mm?
c.Microsteps per Revolution of Leadscrew:Does express motor rotation one circle need 409600pulse?
So (Lead Screw Pitch/Microsteps per Revolution of Leadscrew)=Minimum Incremental Movement,but 1.2nm is not equal 60nm ,why?
2.Kinesis software(Actuator set APT600L X Axis)
a.Step Size=0.5mm: motor rotation one circle forward 0.5mm? but autaul half circle I see.
b.Travel:8mm ,but I could move 12 mm (show on the current device postion).
Does I configuration error?
Thank you. bwood
(posted 2016-09-12 11:09:51.0) Response from Ben at Thorlabs: Thank you for your feedback. I believe this relates to the conversion between microsteps to real world units. For the DRV001 connected to the BSC203, 1mm equates to 819200µs. I will be in direct contact with you so I can gather more details on your system, and troubleshoot you Kinesis issue in more detail. alfred
(posted 2016-09-09 13:13:17.31) Dear Sir:
I come from Chroma ATE Inc.
I have some question for this apt™ Stepper Motor Controllers Type:BSC203
with Motor Type :8 mm Travel Stepper Motor Actuator
As I use Win32 development(refernece ThorLab exmaple code),set velocity=3838090,position=1715200,Acceleration=2253,Motor vibration occurs,(unit:device unit)
but use Kinesis's APP(Version:1.7.0.0),set velocity=2.5,position=10,Acceleration=2,Motor move smooth,(unit:mm)
1.I'd say that this is not the exact setting we wanted on Win32 code.
2.What number is the Minimum Incremental Movement?
Thank you. bwood
(posted 2016-09-12 08:36:18.0) Response from Ben at Thorlabs: Thank you for your feedback. The answers to these questions will depend on the specific method you are using to control your BSC203, and the system you are trying to build. We will be in direct contact to get further details on your setup and to discuss how to control the BSC203. jjurado
(posted 2011-03-22 09:46:00.0) Response from Javier at Thorlabs to benju: Thank you for contacting us with your request. The DRV001 actuators are not compatible with the T-Cube controllers, as they require a higher current input in order to be operated. I will contact you directly for further support. benju
(posted 2011-03-22 01:53:48.0) can this be operated with a t-cube stepper controller as well? klee
(posted 2009-09-24 10:02:13.0) A response from Ken at Thorlabs to jean-thomas.landry: No, the drawing is not showing it at maximum extension. The minimum length is 134mm and the maximum length is 142mm. jean-thomas.landry
(posted 2009-09-23 11:18:40.0) good morning,
Is the pdf drawing of drv001 showing it at maximum extension?
regards, |

 Zoom
Zoom
Required Controller:
KIM001 or KIM101
- KIM001: Single-Channel Output
- KIM101: Four Output Channels, Capable of Multi-Channel Operation
- Standalone Control via Top Panel or PC Control via USB
- Voltage Output from 85 V to 125 V

Click for Details
The control cable can be adjusted up to 110° for space-constrained applications.
Features
- Compact Design: 31.5 mm x 17.0 mm (W x H)
- 20 nm Typical Step Size
- Manual Adjustment via Knob on Adjuster Screw
- 125 V Maximum Operating Voltage
- 1/4"-80 Mounting Thread for Compatibility with Mirror Mounts
- Also Available in 13 mm, 25 mm, and 50 mm Travel Versions for Translation Stages
- Ideal for Set-and-Hold Applications that Require High-Resolution Relative Positioning
Thorlabs' PIAK10 Piezoelectric Inertia Actuator provides high-resolution linear motion control with a long piezo translation range in a compact package. It can support loads up to 2.5 kg (5.51 lbs) and preloads up to 30 N with typical movements of 20 nm and no backlash. The step size can be adjusted up to 30% to a maximum of approximately 30 nm using the KIM101 Controller and Kinesis® software. However, due to the open-loop design, hysteresis, and application conditions, the achieved step size of the system can vary by up to 20%. An external feedback system will need to be used to overcome this variance.
This actuator has a 1/4"-80 threaded barrel that can be mounted to manual mirror mount or positioning stages equipped with 1/4"-80 threads. The actuator is self-locking when at rest and when there is no power supplied to the piezo, making the actuator ideal for set-and-hold applications that require nanometer resolution and long-term alignment stability. Manual adjustments can be made using the knob on the adjuster screw, as long as the piezo is not actively translating the screw; the knob is also compatible with 5/64" (2.0 mm) hex keys.
Powered by a 10 mm long discrete piezo stack, the actuator can operate at speeds of up to 3.5 mm/minute. The design of the piezo motor will rotate the tip of the lead screw during translation. For information on the design of our piezo inertia "slip-stick" motor actuators, please see the complete presentation here.
| Item # | PIAK10 | |||
|---|---|---|---|---|
| Travel | 10 mm (0.39") | |||
| Typical Step Sizea | 20 nm | |||
| Maximum Step Sizeb | <30 nm | |||
| Step Size Adjustabilityc | ≤30% | |||
| Maximum Step Frequencyd | 2000 Hz | |||
| Backlash | None | |||
| Maximum Active Preloade | 30 N | |||
| Typical Angular Resolutionf | Ø1" Mirror Mounts: 0.5 μrad Ø2" Mirror Mounts: 0.3 μrad |
|||
| Recommended Maximum Axial Load Capacityg |
2.5 kg (5.51 lbs) | |||
| Speed (Continuous Stepping) |
2 mm/minute (Typical) <3.5 mm/minute (Maximum) |
|||
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |||
| Motor Type | Piezoelectric Inertia | |||
| Mounting Feature (Auxiliary) |
1/4"-80 Thread with Lock Nut (Ø3/8" [Ø9.525 mm] Barrel) |
|||
| Operating Temperature | 10 to 40 °C (50 to 104 °F) | |||
| Dimensions | 72.9 mm x 31.5 mm x 17.0 mm (2.87" x 1.24" x 0.67”) |
|||
| Cable Length | 1.0 m (3.28 ft) | |||
| Connector | SMC, Female | |||
| Required Controllerh | KIM001 or KIM101 | |||
Required Controller
A KIM001 or KIM101 Controller is required to operate our PIAK10 Piezo Inertia Actuator; the actuator cannot be operated using a standard piezo controller. These drivers have internal sawtooth voltage signal generators capable of sending sub-millisecond pulses (steps) with controllable amplitudes from 85 V to 125 V.
For more information, please see the full web presentation.

Click to Enlarge
Two PIAK10 Inertia Actuators Being Used in Place of the
1/4"-80 Adjustment Screws in our KM100 Mirror Mount
(Mount Sold Separately)
| Posted Comments: | |
Filip Munz
(posted 2019-08-20 00:43:57.353) Is this Piezo Inertia Actuator (PIAK10) suitable for high vacuum (cca 0.5 mtorr)? Or can we use rather integrated optic mount like KC1-P? The purpose is a sample adjustment in the chamber.
Can you provide also a suitable feedthrough (ideally with KF40 dimensions)? rmiron
(posted 2019-08-20 05:31:14.0) Response from Radu at Thorlabs: Hello Filip. Unfortunately, PIAK10 is completely unsuitable for vacuum applications. However, we are very seriously looking into expanding our range of vacuum-compatible products. I will relay your feedback internally in the hope that it will accelerate the process. In the meantime, you could use POLARIS-K1S2P or POLARIS-K1S3P which are piezo-driven, vacuum compatible, 1" mounts. The Polaris line also contains vacuum-compatible posts. If longer travel ranges are required, you could use our Z812V or Z812BV vacuum-compatible actuators.
With regards to feedthroughs, we only offer KF16 & KF25 ones on our website (https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=12861). However, we could offer KF40 ones as a custom item. If you would like to order such custom feedthroughs, please contact your local technical support team. Jin Ic Kim
(posted 2019-03-28 23:06:49.767) When I use two PIAK10 in KM100 mirror mount, contact point of one out of two hole is not surface, so there is damage occurs at the tip of actuator as the tip rotates.
The other comment is that the actuator seems not return its position when I start at 0 to 20000, then send signal to return 0, sometimes big deviation I have. I'm doing wrong? user
(posted 2019-04-03 07:31:30.0) Response from Arunthathi at Thorlabs: Thanks for your query. I have contacted you directly requesting for further information to troubleshoot the issue |

 Zoom
ZoomRequired Controller:
KIM001 or KIM101
- KIM001: Single-Channel Output
- KIM101: Four Output Channels, Capable of Multi-Channel Operation
- Standalone Control via Top Panel or PC Control via USB
- Voltage Output from 85 V to 125 V

Click for Details
The flying lead can be adjusted up to 110° for space-constrained applications.
Features
- Compact Design: 31.5 mm x 17.0 mm (W x H)
- 20 nm Typical Step Size
- Manual Adjustment via Knob on Adjuster Screw
- Rated Down to 10-6 Torr
- 125 V Maximum Operating Voltage
- 1/4"-100 Mounting Thread for Compatibility with KS1TV Ø1" Mirror Mount
- Ideal for Set-and-Hold Applications that Require High-Resolution Relative Positioning
- Vacuum-Compatible PIA13VF Actuator for Translation Stages Also Available
Thorlabs' PIAK10VF Vacuum-Compatible Piezoelectric Inertia Actuator is rated down to 10-6 Torr operation and provides high-resolution linear motion control with a long piezo translation range in a compact, vacuum-compatible package. It can support loads up to 2.5 kg (5.51 lbs) and preloads up to 30 N with typical movements of 20 nm and no backlash. The step size can be adjusted up to 30% to a maximum of approximately 30 nm using a compatible controller and the Kinesis® software. However, due to the open-loop design, hysteresis, and application conditions, the achieved step size of the system can vary by up to 20%. An external feedback system will need to be used to overcome this variance.
The actuator is self-locking when at rest and when there is no power supplied to the piezo, making the actuator ideal for set-and-hold applications that require nanometer resolution and long-term alignment stability. Manual adjustments can be made using the knob on the adjuster screw, as long as the piezo is not actively translating the screw; the knob is also compatible with 5/64" (2.0 mm) hex keys.
This actuator has a 1/4"-100 threaded barrel that can be mounted to the KS1TV mirror mount or other mounts with non-matched 1/4"-100 actuators. Note that the PIAK10VF actuator is not compatible with Polaris® mounts that use 1/4"-100 adjusters. These mounts require a specific actuator ball size and tip design to ensure that the ball contact is centered on the sapphire end stone and that there is proper screw clearance during full translation. In the case of the PIAK10VF actuator, the side of the screw, rather than the ball tip, will contact the sapphire end stone and, as a result, the actuator should not be used with Polaris mounts.
Each actuator has an integrated 0.75 m flying lead, plus 1.0 m of cored cable for wiring outside the vacuum chamber. The flying leads and cored cable lengths can be cut down as needed, but the total length (inside and outside) should not exceed 2.0 m. As shown in the image above, the flying lead for each actuator can be rotated up to 110° for space-constrained applications.
Powered by a 10 mm long discrete piezo stack, the actuator can operate at speeds of up to 3.5 mm/minute. The design of the piezo motor will rotate the tip of the lead screw during translation. For information on the design of our piezo inertia "slip-stick" motor actuators, please see the complete presentation here.
| Item #a | PIAK10VF | |||
|---|---|---|---|---|
| Travel | 10 mm (0.39") | |||
| Typical Step Sizeb,c | 20 nm | |||
| Maximum Step Size | 30 nm | |||
| Step Size Adjustabilityc | ≤30% | |||
| Maximum Step Frequency | 2000 Hz | |||
| Backlash | None | |||
| Maximum Active Preloadd | 30 N | |||
| Typical Angular Resolution | KS1TV Ø1" Mirror Mount: 0.5 μrad | |||
| Recommended Maximum Axial Load Capacitye |
2.5 kg (5.51 lbs) | |||
| Speed (Continuous Stepping) |
2 mm/minute (Typical) <3.5 mm/minute (Maximum) |
|||
| Drive Screw | 1/4"-80 Thread, Hard PVD Coated | |||
| Motor Type | Piezoelectric Inertia | |||
| Mounting Feature (Auxiliary) |
1/4"-100 Thread with Lock Nutf (Ø3/8" [Ø9.525 mm] Barrel) |
|||
| Operating Temperature | 5 to 130 °C (41 to 266 °F) | |||
| Dimensions | 77.7 mm x 31.5 mm x 17.0 mm (3.06" x 1.24" x 0.67") |
|||
| Cable Length | 0.75 m (2.48 ft) Flying Lead for Vacuum, 1.0 m (3.3 ft) of Cored Cable for Wiring Outside Chamber |
|||
| Connector | SMC, Female | |||
| Vacuum Rating | 10-6 Torr | |||
| Required Controllerg | KIM001 or KIM101 | |||
Required Controller
A KIM001 or KIM101 Controller is required to operate our PIAK10VF Piezo Inertia Actuator; the actuator cannot be operated using a standard piezo controller. These drivers have an internal sawtooth voltage signal generator capable of sending sub-millisecond pulses (steps) with controllable amplitudes from 85 V to 125 V.
For more information, please see the full web presentation.

Click to Enlarge
Three PIAK10VF Inertia Actuators Being Used in Place of the
1/4"-100 Adjustment Screws in our KS1TV Mirror Mount
(Mount Sold Separately)
| Posted Comments: | |
| No Comments Posted |

 Zoom
ZoomFeatures
- 1.5 cc Syringe of Apiezon 100 Grease
- Convenient, Inexpensive Package that Reduces Waste
- Prolongs Lifetime of Actuator
- Ready to Dispense
- Vacuum Compatible to 10-9 Torr
This Apiezon grease has excellent anti-seize properties. It contains PTFE for maximum lubricity and is ideal for re-lubricating the lead screw threads of our ZST, ZFS, and Z8 series actuators described above. It is supplied in a syringe for easy application and is recommended both for general use and for vacuum applications down to 10-9 Torr. It has an optimal working range of 10 to 30 °C (50 to 86 °F).
Note: It is recommended that the lead screws of the Z8, ZFS, and ZST motors are lubricated every 50,000 cycles or 6 months, whichever comes first.
| Posted Comments: | |
| No Comments Posted |